交流伺服電動機中的濾波器

c.速度反饋濾波器
速度反饋濾波器也為一階延遲濾波器,這是一個純粹的慣性環(huán)節(jié),相移趨于90°。在高頻時增益小,當高頻處有幾個諧振點時適用。增益在-3db規(guī)定為帶寬頻率,設置范圍從50~1000hz(見圖3)。注意使用時相移可到90°,可能會發(fā)生相移引起的振蕩。
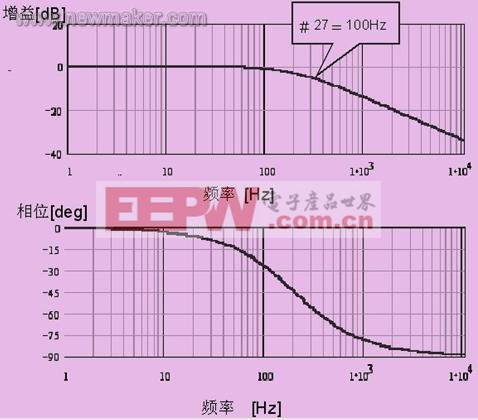
圖3 速度反饋濾波器bode圖
1. 先調陷波濾波器1和2使其振蕩值到最小,如果無效果就關閉該濾波器。
2. 再調整相位滯后補償濾波器。
#24= n×#2
#25= 4×#24
參數(shù)#24為一階滯后補償頻率#1;
參數(shù)#25為一階滯后補償頻率#2;
參數(shù)#2為速度控制帶寬#1。
設置參數(shù)#24用n=3,n=2,n=1來試,不能使振蕩停止就關閉該濾波器。
3. 減低參數(shù) #1的值(伺服剛性設置)。返回到步驟1。反復調整直至滿意。
若自調整時出錯,可將負載慣量設置為零,并增加自調范圍(參數(shù)#51,自調模式執(zhí)行范圍)。若自調整時振蕩則降低伺服剛度直到諧振停止。再重復執(zhí)行自調整,濾波器調整。
各種型號的這類電動機和驅動器均有它自己的調試、控制和設置參數(shù)的軟件界面,或對控制器,或對驅動器,但都大同小異,這里不做介紹。在調試的過程中須反復實驗觀察,根據(jù)使用要求靈活應用。例如在對一個由這類電動機構成的轉臺測試設備,測量時對轉速穩(wěn)定要求嚴格,而對加速度并不做嚴格要求,只要加速區(qū)不是太長就行,被測對象種類較多,重量、慣量、剛度各不一樣,并且更換被測對象頻繁。使用自動調整,在加載,空載,或換負載對象時常發(fā)生諧振,要重新執(zhí)行自動調整才行。為此筆者將系統(tǒng)增益降低,使輸出特性硬度減低,犧牲快速性而增加穩(wěn)定性,使各種負載時均不振蕩也不降低測量精度。在另一套系統(tǒng)中筆者甚至將帶阻陷波濾波器硬件斷開,拔去連接插頭,才能使系統(tǒng)穩(wěn)定。

電動機相關文章:電動機工作原理設計








評論