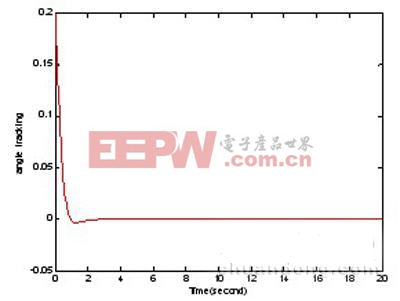
圖3杠桿角度隨時間變化曲線
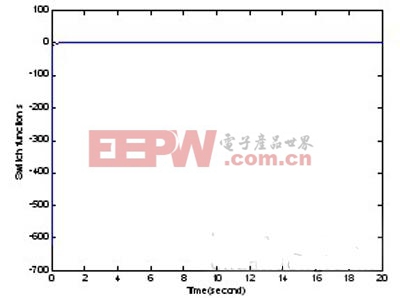
圖4切換函數對時間變化曲線
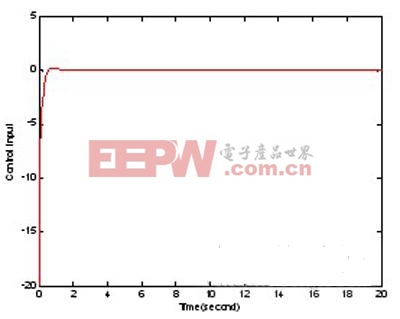
圖5控制律隨時間變化曲線
由以上仿真結果可以看出,利用本文方案設計的控制器大大加快了系統的響應速度,且能有效地減小系統的最大偏差,系統的抖振現象也基本可以消除。
5結論
本文介紹了蹺蹺板系統的工作原理,建立了蹺蹺板系統的數學模型。針對常規滑模控制中存在的抖振現象,將模糊滑模控制方法引入蹺蹺板控制系統中,通過仿真可以看出,將模糊滑模控制應用于具有強耦合、非線性特性的蹺蹺板系統是切實可行的,而且使用滑模模糊控制算法設計出來的控制器具有很強的魯棒性。














評論