一種轎車電動車窗防夾控制系統設計

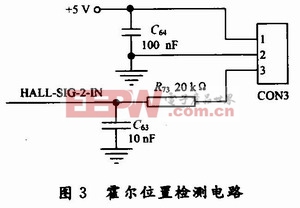
車窗位置測定采用霍爾傳感器輸出脈沖計數的方式實現。采用英飛凌TLE4923霍爾傳感器,直接輸出方波信號,經低通濾波,將脈沖信號輸入MCU對其進行計數,進而確定車窗的當前位置,如圖3所示。本文引用地址:http://www.104case.com/article/162728.htm
3 軟件設計
系統的軟件設計不但要考慮控制的方便性,也要考慮將來功能的擴展性。因此,本系統的軟件設計基于實時操作系統,即首先將μC/OS -Ⅱ實時操作系統內核移植到XCl64CS MCU上,之后將防夾車窗控制以其中的一個任務的方式添加上去。
3.1 μC/OS-Ⅱ實時操作系統內核移植
所做的移植,就是將μC/OS-Ⅱ實時內核移植到XCl64CS微控制器上。由于μC/OS-Ⅱ在讀寫處理器寄存器時只能通過匯編語言來實現,所以一些與處理器相關的代碼要用匯編語言寫,但大部分的μC/OS-Ⅱ代碼用C語言編寫。移植工作主要使μC/OS-Ⅱ正確定義和使用XCl64C-S。具體請參考本文作者撰寫的文章,此處不再贅述。
3.2 防夾電動車窗軟件設計
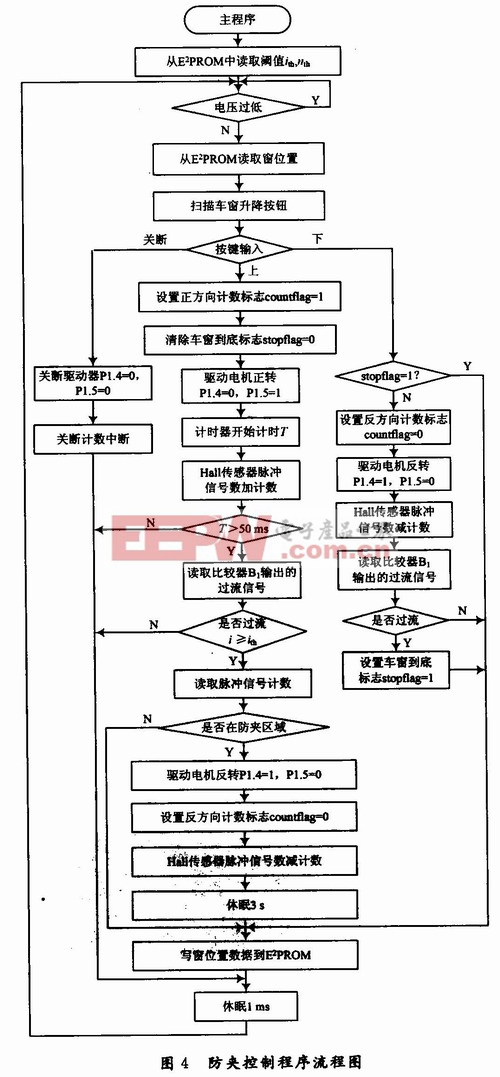
在所設計的硬件平臺上將μC/OS-Ⅱ實時操作系統移植后,將防夾電動車窗控制以任務方式加入,并參照前文內容實現防夾功能,其流程圖如圖4所示。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理









評論