一種無超調(diào)鈍角拐點(diǎn)的PlD溫控設(shè)計(jì)

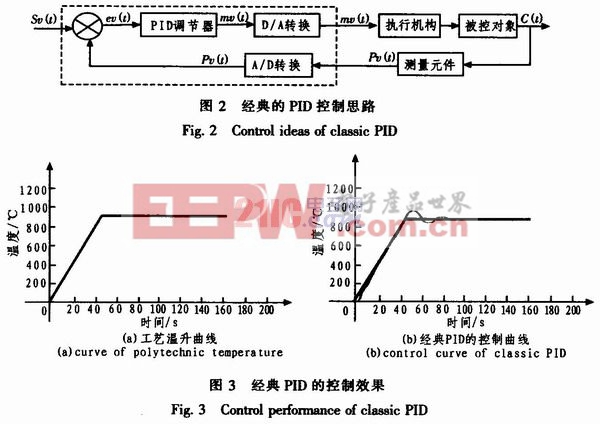
由于在實(shí)際的生產(chǎn)過程中要執(zhí)行的溫升曲線是圖3(a)所示的工藝要求,Sv(t)輸入量(給定值)在溫升階段期間。系統(tǒng)在采樣周期Ts的作用下是按階梯量的形式給定的,這就相當(dāng)于每次給定的是一階躍函數(shù)加n-1次的偏差值ev之和,因而,在實(shí)施PID做溫度調(diào)節(jié)時(shí)出現(xiàn)溫度超調(diào)振蕩的現(xiàn)象是難免的,控制結(jié)果如圖3(b)所示。因而,經(jīng)典的PID控制結(jié)果是不能滿足圖3(a)的控制需求。
2.2 在實(shí)踐中對(duì)該P(yáng)ID溫控算法所做的設(shè)計(jì)改進(jìn)
2.2.1 引入積分分離PID控制算法
積分分離PID控制算法是一種遇限消弱積分項(xiàng)的PID算法,對(duì)消除系統(tǒng)超調(diào)非常有效。其方法如下:根據(jù)實(shí)際調(diào)試情況,人為設(shè)定一閾值ε(ε>0);當(dāng)偏差值|ev(n)|>ε時(shí),采用PD控制,既可避免過大的超調(diào)又可使系統(tǒng)有較快的響應(yīng);當(dāng)偏差值|ev(n)|≤ε時(shí),采用正常的PID控制,以便保證系統(tǒng)的控制精度。這就需要在辨識(shí)決策環(huán)節(jié)中引入一積分項(xiàng)的控制系數(shù)β,β按下述條件取值。
引入積分項(xiàng)的控制系數(shù)β后,第n次采樣時(shí)控制器的輸出為:

2.2.2 引入帶死區(qū)的PID控制算法
在實(shí)際的控制系統(tǒng)中,采樣周期Ts為100 ms。為避免控制動(dòng)作的過于頻繁而引起的振蕩。引入了帶死區(qū)的PID控制,其控制框圖如圖4所示。相應(yīng)的控制算式為:
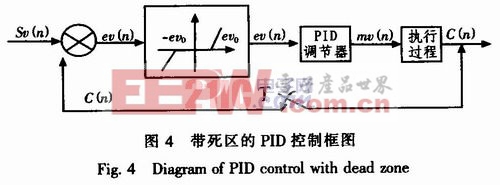
式中,死區(qū)evo是一個(gè)可調(diào)參數(shù),其具體數(shù)值則根據(jù)實(shí)際調(diào)試情況而定,evo數(shù)值越小,控制動(dòng)作越頻繁,達(dá)不到穩(wěn)定被控對(duì)象的目的;evo數(shù)值越大,則系統(tǒng)產(chǎn)生較大滯后,根據(jù)實(shí)際調(diào)試結(jié)果,在該溫控系統(tǒng)中evo=2.0℃。
在引入死區(qū)控制的同時(shí),本系統(tǒng)還設(shè)定了偏差值ev(n)大于某一上限定值ev(h)時(shí)則按比率認(rèn)可ev(n)的數(shù)值,以此來限定由瞬間擾動(dòng)產(chǎn)生的控制波動(dòng),此方法對(duì)保證系統(tǒng)控制的穩(wěn)定性簡潔有效。
2.2.3 引入微分先行的PID控制算法
微分先行的PID控制算法的特點(diǎn)是只對(duì)輸出量C(n)進(jìn)行微分,而對(duì)給定值Sv(n)不作微分,因而,在改變給定值時(shí),輸出穩(wěn)定(微分項(xiàng)不參與)使被控量的變化比較緩和,這種輸出量微分先行的控制算法非常適應(yīng)與給定值頻繁變化的場(chǎng)合,可以有效地抑制因給定值變化而引起的系統(tǒng)振蕩。在本項(xiàng)目中,正是考慮到在溫度上升階段時(shí)在采樣周期Ts的控制下每次的給定值都存在階躍變化,因而引入微分先行的控制算法可明顯改善系統(tǒng)的動(dòng)態(tài)特性。微分先行的控制算式:

2.2.4 引入居里點(diǎn)溫度檢測(cè)的PID變參量控制算法
由于本系統(tǒng)的加熱源采用的是電磁感應(yīng)加熱方式,在此方式下,當(dāng)金屬加熱到居里點(diǎn)以上溫度時(shí),由于導(dǎo)磁率的急劇變化將使加熱效率亦產(chǎn)生較大的變化,因此,在PID控制中,相應(yīng)的比例參數(shù)Kp、積分參數(shù)Ki、和微分參數(shù)Kd也將隨之相應(yīng)的變動(dòng),變動(dòng)量的大小根據(jù)加熱工件的材質(zhì)、尺寸、生產(chǎn)節(jié)拍均成函數(shù)關(guān)系。另一方面,為保證控制效果無超調(diào)并形成鈍角的拐點(diǎn),對(duì)系統(tǒng)的輸出量mv(n)也需進(jìn)行比例輸出,本參數(shù)的變動(dòng)量也是一與工件加熱工藝關(guān)聯(lián)的函數(shù),其數(shù)值的優(yōu)化需在調(diào)試中確定。










評(píng)論