三軸慣性傳感器ADISl6355在姿態(tài)檢測中的應(yīng)用

2.3 電源模塊
電源模塊主要為STM32F103VB、ADISl6355和無線數(shù)據(jù)傳輸模塊供電,其電路設(shè)計如圖4所示。鋰電池提供的11.1 V電源經(jīng)ASMlll7-5.O轉(zhuǎn)換為5 V,再經(jīng)過ASMlll7-3.3轉(zhuǎn)換為3.3 V。其中,5 V為ADISl6355提供電源,3.3 V為STM32F103VB和無線數(shù)據(jù)傳輸模塊提供電源。Dl是用于電源指示的LED,Rl為O.5 A可恢復(fù)保險。本文引用地址:http://www.104case.com/article/162642.htm
為加速度計測得的加速度,通過式(2)可推算得到俯仰角和橫滾角如下:
![]()
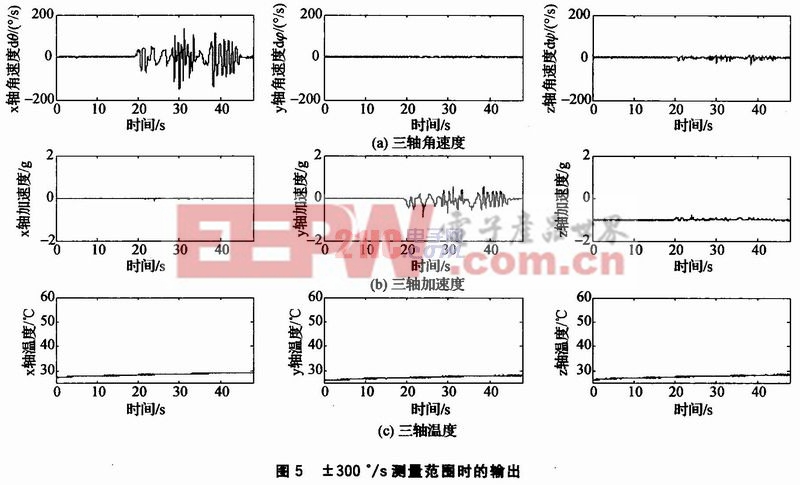
配置陀螺的測量范圍為±300°/s,1 min內(nèi)測得的ADISl6355三個軸的角速度、加速度和溫度曲線如圖5所示。在約19 s時使飛行器繞x軸進行滾轉(zhuǎn)運動,在約45 s時使飛行器恢復(fù)到剛開始的靜止?fàn)顟B(tài)。由圖5可知,靜止時角速度的輸出范圍為±2°/s,x、y軸加速度計的輸出范圍為±O.015 g,溫度由26℃到30℃逐步上升。若把陀螺的測量范圍配置為±75°/s,靜止時的角速度輸出范圍為±l°/s,但很容易超出±75°/s的范圍,因此±75°/s的測量范圍不適用于四軸飛行器姿態(tài)檢測。

傳感器相關(guān)文章:傳感器工作原理
風(fēng)速傳感器相關(guān)文章:風(fēng)速傳感器原理 稱重傳感器相關(guān)文章:稱重傳感器原理 加速度計相關(guān)文章:加速度計原理










評論