基于AVR單片機的滅火機器人設計與實現

圖4電機驅動電路本文引用地址:http://www.104case.com/article/162619.htm
2.4 傳感器部分
滅火比賽需要機器人在盡量不碰撞墻壁的基礎上盡可能快地找到蠟燭并將火滅掉。在完成任務的過程中首先需要不碰撞墻壁,然后需要判斷前方是否有火焰。在找到火焰后需要判斷蠟燭旁邊的白線。如果碰撞墻壁的話,需要機器人能檢測出來并進行處理,不然就會發生機器人卡死的情況,那就不能完成任何任務。
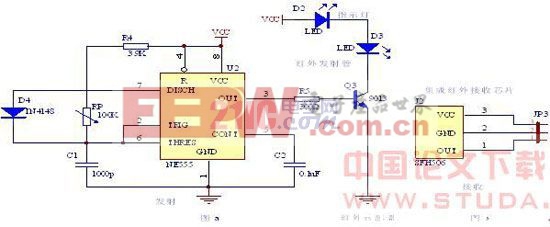
圖5紅外傳感器電路
圖5所示為紅外傳感器的發射和接收電路。紅外射管采用脈寬調制(PWM)驅動,工作在38KHz的頻率下,減少發射電路的功耗。脈沖發生器由NE555構成,通過外部的電位器R1來調節占空比和脈沖頻率,由于紅外肉眼不可見,所以電路中加入一個LED指示燈來指示紅外發射管是否在工作。該LED和紅外發射管串聯,當紅外發射管正常工作時,該LED燈會點亮。接收電路采用西門子公司生產的紅外專用集成接收芯片SFH506-38,它只有接收到38KHZ的脈沖波時才會作用。它內部集成了選項、濾波、放大電路,對外只有3個引腳:①腳為信號輸出端;②腳為接地端;③腳為電源端,所以使用起來非常方便,效果比較理想。
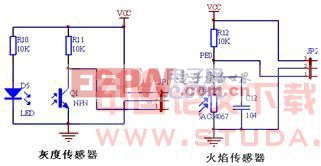
圖6灰度傳感器和火焰傳感器
灰度傳感器是模擬傳感器,有一只發光二極管和一只光敏電阻,安裝在同一面上。灰度傳感器利用不同顏色的檢測面對光的反射程度不同,光敏電阻對不同檢測面返回的光其阻值也不同的原理進行顏色深淺檢測。
火焰傳感器是模擬傳感器。它利用紅外敏感型元件對紅外信號強度的檢測并將其轉換為機器人可以識別的信號,從而來檢測火焰信號。火焰傳感器可以用來探測波長在700nm~1000nm范圍內的紅外線,探測角度為60º;,其中紅外線波長在880nm附近時,其靈敏度達到最大。
碰撞傳感器使用碰撞開關,通過I/O口可直接作為數字量輸入。












評論