基于AVR單片機的滅火機器人設(shè)計與實現(xiàn)

根據(jù)滅火比賽的規(guī)則要求,配以碰撞傳感器、灰度傳感器、火焰傳感器和紅外傳感器。通過兩路PWM控制兩只電機以驅(qū)動滅火機器人,另外一路滅火電機由I/O口通過光電耦合器直接驅(qū)動。

圖2系統(tǒng)總體框圖
2.2 系統(tǒng)電源部分
系統(tǒng)采用單電源供電電路時比較簡單,但是考慮到電動機起動瞬間電流很大,會造成電源電壓不穩(wěn),影響單片機和輸入電路工作的穩(wěn)定性和可靠性,因此采用雙電源供電方案。將電機電源和單片機電源完全隔離。單片機以及傳感器電路使用8V供電,電動機使用12V供電。提高電動機的供電電壓,可以提高機器人的運行速度,從而可以提高滅火的成績。
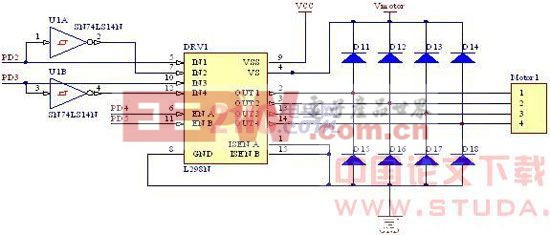
2.3 電機驅(qū)動部分
機器人需要控制在一個合適的速度行駛,在滅火的過程中既要以較快的速度找到火源,又要防止因為碰撞而影響比賽的成績。小車的速度是由兩只直流電機控制。L298驅(qū)動芯片是性能優(yōu)越的小型直流電機驅(qū)動芯片之一。它可被用來驅(qū)動兩個直流電機或者是雙極性步進電機。在6—46V的電壓下,可以提供2A的額定電流。L298還有過熱自動關(guān)斷功能,并有反饋電流檢測功能。為保證L298正常工作,建議加裝片外續(xù)流二極管。由ATmega32單片機直接輸出兩路PWM驅(qū)動L298N。改變PWM調(diào)制脈沖占空比,可以實現(xiàn)精確調(diào)速。脈沖頻率對電機轉(zhuǎn)速有影響,脈沖頻率高連續(xù)性好,但帶負載能力差;脈沖頻率低則反之。通過PD2和PD3兩根I/O口線來控制電機的轉(zhuǎn)動方向。
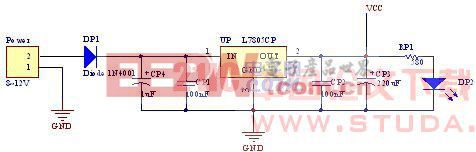
圖3單片機電源電路












評論