一種基于神經網絡感知器的雙足行走機器人穩定性控制方法

(2)訓練隨機選取一輸入、輸出模式對(Sk,Yk),這里k=1,2,Λ,m時,網絡進行以下步驟的訓練。
第一步,計算連接層各單元的輸出

第二步,以連接層的輸出作為輸入層的各單元的輸入計算輸出層的實際輸出
在學習過程中,當所有的m個樣本模式對都提供給網絡學習一遍后,還需從頭再繼續提供給網絡學習。直到達到最大學習次數,以防止發散或無限震蕩,或者滿足誤差限制。
3 計算機控制系統
機器人重心位置是由腳底的力傳感器測定的。當某一側的傳感器輸出值趨于零或小于預定的值時,說明重心已經偏向相反的另一側,機器人處于危險狀態。這時機器人就應該產生一定的動作,向另一側跨出一腳,以使機器人的重心位于支撐面內。
整個控制系統如圖2所示。本文引用地址:http://www.104case.com/article/162589.htm
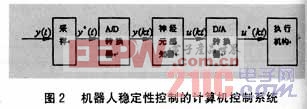
其中,y(t)是傳感器輸出向量,為模擬量,經采樣、A/D轉換后為人工神經網絡感知器的輸入向量y(kt)。
本文取感知器的輸入層單元與輸出層單元的個數相同。感知器經過訓練好以后,系統將時實監控機器人的重心位置,當重心偏向某側,相反側的力傳感器的輸入小于設定的安全值時,神經網絡相應于該側的輸出為1,其余均為0,系統將根據神經網絡的輸出,做出相應的動作指令;當傳感器的輸入均大于設定安全值時,神經網絡的輸出均為0,系統不產生任何動作指令。
4 仿真
本文假設在機器人的腳底安裝有力傳感器,左腳的后部、左部和前部各一個,右腳的前部、右部和后部各一個。依次編號為pi,i=1,2,Λ 6,構成輸入向量
P=[p1,p2,p3,p4,p5,p6]T
假設機器人的重是100kgf,當機器人的腳底的傳感器輸出為2kgf,即認為機器人處于危險狀態。設神經網絡感知器的輸入為
對應的理想輸出為













評論