單相逆變器多環反饋控制策略分析

應用了一個多環反饋控制策略來調節不間斷電源逆變器的輸出。分析了這種控制策略的時域與頻域特性。最后給出了仿真和實驗波形,結果證明了這種控制方法對線性負載和整流橋負載都有很好的控制效果。
關鍵詞:逆變器;多環反饋;數字控制
0 引言
過去對逆變器的研究側重于采用新型高頻開關功率器件,從而減小濾波器尺寸,優化輸出濾波器設計以實現低輸出阻抗等,這些措施能在一定程度上抑制輸出波形失真并改善負載適應性,但是還不夠理想。為了進一步提高逆變器的動態和靜態特性,必須采用新的控制方法。采用重復控制技術,可以較好地抑制周期性干擾,但是,重復控制延時一個工頻周期的控制特點,使得單獨采用重復控制的逆變器動態特性極差,基本上無法滿足逆變器的指標要求。如果將雙環控制和重復控制相結合形成復合控制方法,就可以達到較好的效果。但是,這種控制方法要占用較多的運算時間,提高了成本,使系統變得復雜。具有非線性補償的滑模控制在逆變器的閉環控制中也得到了應用,盡管滑摸控制有著快速的動態響應,對系統參數和負載變化不敏感,但是建立一個令人滿意的滑模面是很困難的。
電容電流采樣的雙環控制可以極大地提高系統的動態反應速度,如果把順饋控制和逆饋控制相結合,組成復合控制系統,那么可以達到比較理想的控制效果。本文所采用的就是這種帶有順饋補償的輸出電壓和濾波電容電流反饋的復合控制方案。
l 逆變器的控制模型
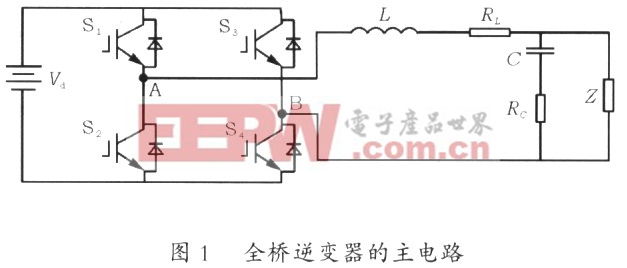
圖1是全橋逆變器的主電路圖,Vd是直流電壓源,S1~S4是4個IGBT開關管,L和C是濾波電感和濾波電容,用于濾除逆變系統中的高次諧波。RL和RC是濾波電感和濾波電容的等效串聯阻抗。z是負載,負載可以是純阻性也可以是非線性等。圖1所示的逆變器主電路由于開關器件的存在是個非線性系統。但是,當器件的開關頻率遠遠大于逆變器輸出電壓的基波頻率時,可以用狀態空間平均和線性化技術來分析。按照圖1所示,可以得到下面的逆變器模型的動態方程:
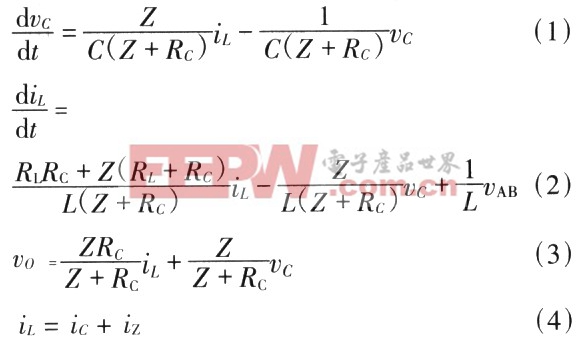
式中:iC,iL,iZ,分別是通過電感,電容,負載的電流。
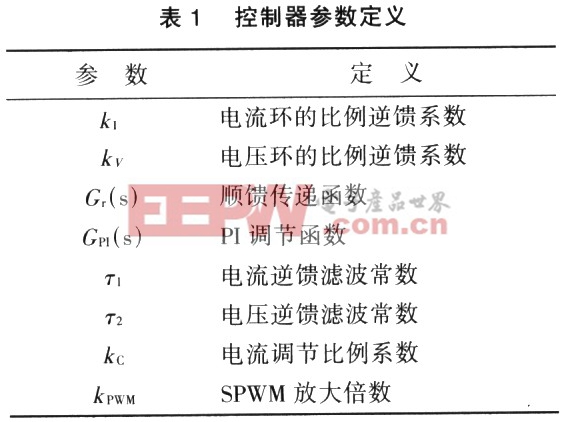
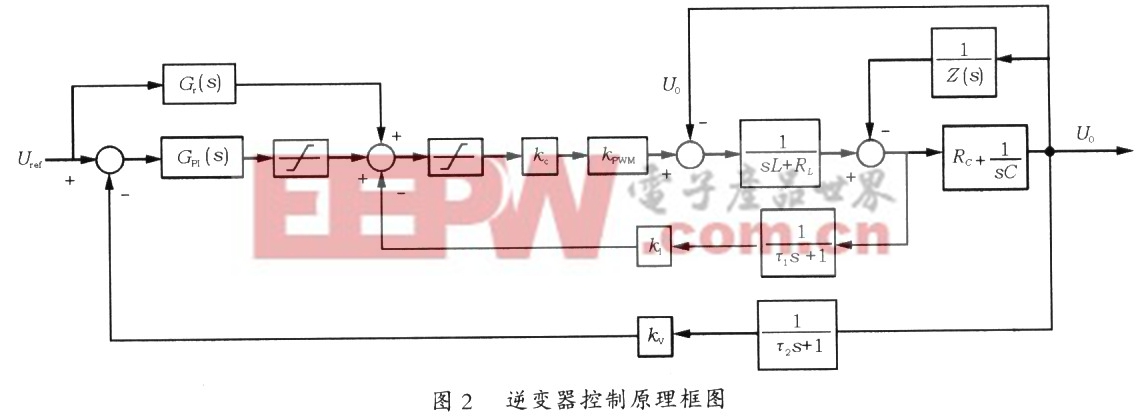
式中:ic,iL,iz上面的動態方程顯示了逆變器中各個量的相互關系。在上面建立方程的過程中,逆變器可以看作一個具有恒定增益的放大器。以上述的動態方程為基礎,可以設計一個如圖2所示的復合控制器。圖2中各參數的定義如表1所列。






評論