應用于UPFC動力學模型的ANN-PID復合控制

3 ANN-PID復合控制器設計
3.1 神經網絡控制概述
從控制的觀點,可以把神經網絡看作一個具有m 維向量輸入和n維向量輸出的非線性動力學系統,并通過一組狀態方程和一組學習方程加以描述。狀態方程描述每個神經元的興奮或抑制水平與它的輸入及輸出通道 上的聯結強度間的函數關系,而學習方程描述通道的聯結強度應該不斷地修正。神經網絡就是通過修正這些聯結強度進行學習,從而調整整個網絡的輸入輸出關系。
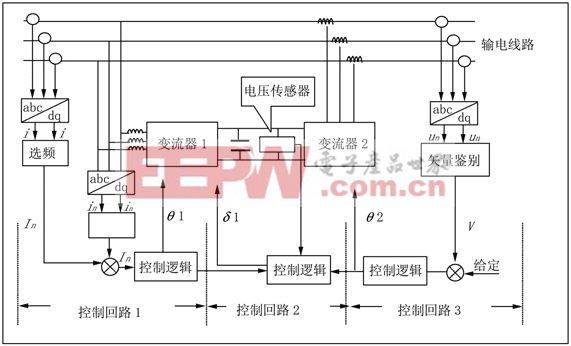
圖2 UPFC的三個控制回路
3.2 神經網絡控制器設計及訓練樣本獲取 我們使用BP網絡及其誤差反傳學習算法,網絡結構如圖3所示: 在確定網絡結構和學習算法以后,可以開始對網絡進行離線訓練。訓練之前的樣本獲取是一項十分重要的工作。它決定了訓練后的網絡性能。樣本獲取的途徑 因控制對象的不同而異本文的控制對象已給出確定的動力學模型。通常,對于有確定數學模型的控制對象并不適合采用人工神經網絡控制。原因在于基 |
圖3 BP神經網絡結構 |

于精確數學模型的控制規律設計理論已相當成熟且應用廣泛。但是,本文的控制對象具有多回路、強耦合、非線性的特點。作者曾采用PID控制,雖然也能使三個回路達到穩定,但由于耦合作用的存在和PID算法的局限性,導致了較大的超調量和較長的過渡過程。
PID控制性能差的原因在于暫態過程是一個“邊解耦,邊控制”的過程,而且PID的固有缺陷使它難以兼顧快速性和穩定性。這里使用BP神經網絡主要目的是避開解耦過程,利用BP網絡的非線性映射功能直接得出三個回路的控制量。訓練樣本獲取方案如下:
![]()
輸入矢量的形成:系統共三個回路,即三個被控量Q、V、Udc。輸入矢量由被控量的偏差劃分為七個檔次經排列組合而得到。因此,輸入矢量總數
目標矢量的形成:系統控制量分別為θ1、θ2、δ1。給定一個輸入矢量(ΔQiΔViΔUdci),通過PID算法可以得到穩態輸出(θ1i、θ2i、δ1i),這個穩態下的輸出即為相應的目標矢量。作者采用這種方法獲取目標矢量的主要原因是可以借助控制系統的仿真軟件(MATLAB)方便地得到。
3.3 ANN-PID復合控制
利用BP 網絡的映射功能形成控制量,雖然避開了多回路解耦過程,但由于是開環控制無法消除穩態誤差。眾所周知,PID控制用于小偏差線性系統時具有明顯的優勢。于 是,本文設計了ANN-PID復合控制的方法,即在大偏差范圍內投入神經網絡控制器,小偏差范圍內切換到PID控制器。兩個控制器的切換通過編程是很容易 實現的。





評論