應用于UPFC動力學模型的ANN-PID復合控制

1.2 UPFC的動力學模型
串聯支路的回路方程:
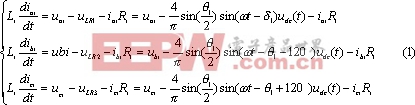 |
并聯支路的回路方程
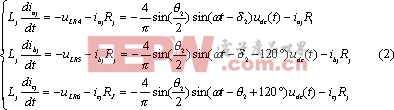 | |||
式中的Lj、Rj是根據戴維南定理得出的串聯變壓器輸出阻抗(注意:Lj、Rj在圖1中沒有標出)。另一方面,再由能量守恒可知,直流側電容的充放電過程決定于UPFC兩側有功的不平衡性,有:
式(1)、(2)、(3)、(4)構成了UPFC裝置的動力學模型。
2 UPFC的控制回路
UPFC裝置本身包括三個控制回路,在這三個回路基礎上增加網絡方程和發電機方程即可得到含UPFC的系統數學模型(注:本文只研究UPFC裝置內部三個基本控制回路,若還要關注系統,只需在此基礎上增加相應方程)。
由圖2可見(見下頁),UPFC裝置的控制系統包括三個控制回路。控制回路1的作用是實時補償輸電線路無功功率(標幺制下的無功電流Iq);控制回路2的作用是維持直流連接電容電壓Udc恒定;控制回路3的作用是調節串聯變壓器輸出電壓V。不難看出,控制回路2與另外兩個控制回路存在耦合作用。因此,若三個控制回路均采用PID控制邏輯很難得到滿意的控制效果。作者設計的神經網絡(ANN)與PID的復合控制規律取得了良好的效果。





評論