基于單片機的模糊控制系統

3.2 硬件設計
1、ATmega8是采用低功耗CMOS工藝生產的基于AVR RISC結構的8位單片機。工作電壓4. 5-5.5 V,芯片內部集成A/D轉換功能。通過編寫程序,可將芯片的PC0至PC6口從普通的I/O口功能用作8位或10位A/D轉換,從而省去外圍的A/D轉換 電路。ATmega8內部有3個定時器T0,T1和T2,本系統使用2個,分別用作Ss的溫度數據采集和5 NS的LED刷新顯示。
2、 DS18B20支持“一線總線”接口,從而提高了系統的抗干擾性。溫度測量范圍從-55℃~+ 125℃,在-10℃~+85℃時測量精度為0. 5℃。DS18B20采用3腳TO-92封裝。分別為GND電源地,DQ數據輸人/輸出端(單線總線),VDD外接供電電源輸人端(3.0~5. 5 V) 。DS18B20內部主要由寄生電源、溫度傳感器、64位激光ROM單線接口和配置寄存器等組成。在本系統中,將DQ接ATmega8的PC4口,VDD 與單片機Vcc同接+5V電源,并在DQ和VDD之間接一個4. 7 kΩ的上拉電阻,即可完成溫度的采集部分的硬件電路。
DS18 B20規定了自己的通信協議,在每一次的溫度采集轉換時必須要經過以下的步驟:每一次讀寫之前都要進行復位;復位后發送一條ROM指令;發送RAM指令。 復位要求ATmega8將數據線下拉500μs,然后抬至高電平,DS18B20收到信號后等待16~60μs后發出60~240μs的低脈 沖,ATmega8收到此信號后表示復位成功。
3、鍵盤用作上位機對下位機的通信控制。顯示電路采用10位共陰極LED,通過3片Max595芯片與單片機相連,同時顯示當前溫度值和設定值。外圍電路同時有4個按鍵,可進行溫度逐次加減、功能切換以及保存等功能。
3.3 軟件設計
整個系統的硬件電路設計相對簡單。在本系統中采用增量型PID控制算法,即:
△u(k)=u(k)-u(k-1)=KP[e(k)一e(k-1)]+Ki(k)+Kd[e(k)一2e(k-1) +e(k-2)]
式中,△u(k)為控制增量;KP為比例參數;Ki為積分參數;Kd為微分參數;e(k)為系統偏差。先根據KP、 Ki 、Kd的值,計算出輸出U的初值,再根據操作人員的給定值得到偏差e和偏差變化率ec,然后通過模糊規則表推導出KP'、 Ki' 、Kd'的值,再計算出△u。
由于增量型的算法不需要累加量,控制增量△u僅僅與最近的采樣次數有關,所以誤動作時的影響小,而且比較容易通過加權處理獲得比較好的控制效果。這也是本系統采用增量型的PID控制算法作為Fuzzy PID控制器中的PID調節器部分算法的原因。
模糊控制器的關鍵是總結操作人員和技術人員的實際操作經驗和技術知識,并建立合適的模糊規則表,并將模糊規則表通過程序編寫人單片機ATmega8中的EEPROM中去,在線時通過查詢得到合適的PID參數。
控 制器的控制范圍為整個測量系統的測量范圍,各個隸屬函數的論域范圍既要滿足覆蓋的原則,又不要使規則過多。根據多次實驗,在本系統中,偏差e和偏差變化率 ec的變化范圍為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。其模糊子集為e、ec= {NB,NM,NS,O,PS,PM,PB},分別代表負大,負中,負小,零,正小,正中,正大。在本系統中,所設定的偏差e和偏差變化率ec以及KP、 Ki 、Kd的各個子集均采用正態分布。
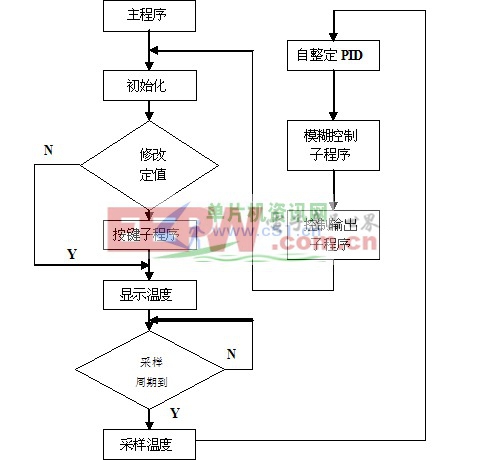
圖3 程序設計流程圖
應用模糊合成推理使在線運行的過程中完成對PID參數的自行調整,具體步驟為:(1)采樣獲取當前溫度數據。(2)獲 取偏差和偏差變化率:e(k)=R(k)-Y(k);ec(k)=e(k)-e(k-1)。(3) e(k)和ec ( k)模糊化。(4)計算當前KP、 Ki 、Kd。(5)PID控制器輸出。
在編寫程序時,考慮到由于溫度系統變化化緩慢,所以采樣周期用軟件和硬件相結合的方法,即用ATmega8的T1和軟件計時相結合的方法。
在等待采樣周期到達的期間內不斷進行掃描和顯示過程,通過LED顯示給定溫度和采樣的溫度,通過ATmega8的T0進行5 ms的定時刷新LED。
模型控制子程序是根據采樣值和給定值求得溫度的偏差和偏差變化率,將KP、 Ki 、Kd三個參數的模糊規則表寫人單片機的EEPROM中,通過在線查表獲得控制。具體流程圖如上圖3所示。
4 結論
本文首先介紹了模糊控制理論的基本原理,在此基礎上將模糊控制理論與常規PID控制相結合,在以單片機ATmega8為系統核心部件對溫度進行控制。相較單 一的PID控制來說,模糊PID控制的效果具有動態效果好,上升時間快,超調小的優越性,在本系統中也取得了很好的控制效果。另外可以發現,傳統控制與模 糊控制是可以協同工作、相互補充的。
本文作者創新點為:將模糊控制系統應用于水溫的監控中,打破了傳統的控制思路。另外將單片機應用于控制系統中,使控制系統更加簡潔,更容易控制,為工業控制系統提供了另外一條更好的思路。

pid控制器相關文章:pid控制器原理











評論