基于DSP的無位置傳感器永磁同步電機磁場定向控制系統

式(8)為基本電流觀測器,式(9)為BANG-BANG控制器。二者組成滑模電流觀測器,目的是通過適當選擇Z和估計反電勢,使估計電流和實測電流誤差為零。二者離散形式為
(2)估計反電勢 
(3)轉子磁鏈位置θ估算
由反電勢來估計轉子磁鏈位置角,式(14)為反電勢綜合矢量表達式,可根據反電勢在α、β軸上的分量來求解轉子磁鏈位置角,即式
(4)轉子磁鏈位置校正
采用低通濾波器來獲得反電勢,引入了相延遲。該延遲與低通濾波器的相位響應直接相關,其截止頻率越低,對應固定頻率的相延遲越大。
基于低通濾波器的相位響應,做一個相延遲表,可以通過查表求得運行時對應指令速度(頻率)的相移角。該相移角加上得到。
4 系統軟件流程
主程序流程如圖6所示,只完成系統硬件和軟件的初始化任務,然后處于等待狀態。完整的FOC控制算法在PWM中斷服務程序中實現。在一個中斷周期內,流程依照系統控制框圖圖2,從一路AD采樣電流,計算轉子位置角,計算轉速,完成所有反饋通道計算后,再調用正向通道中計算模塊函數,最后輸出三相逆變橋的空間矢量PWM波信號。

5 涉及的硬件
直流電壓供電的三相逆變橋輸出接星型接法的三相電機定子繞組。DSP提供的六個PWM輸出經光耦隔離以驅動三相逆變橋開關器件。
置于直流回路的電阻傳感器,提供電機線電流電壓信號,該信號經放大后送入DSP的ADC通道。在實現控制算法時,由TMS320C24x控制器的EVM事件觸發中斷進行AD采樣。
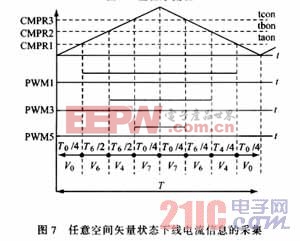
在每個對稱空間矢量PWM周期的前半周期開關狀態(Sa,Sb,Sc)從(0,0,0)變到(1,1,1),在這一過程的兩個中間狀態采樣線電流信號,在圖7中為(1,0,0)和(1,1,0),結合圖3定義的三相橋臂開關狀態,(1,0,0)時線電流對應a相電流值ia,(1,1,0)時線電流對應c 相電流值-ic,這樣在一個周期內兩次采樣分別得到兩相電流值,另一路由ia+ib+ic=0得到。
6 結論
本文介紹了一種對 PMSM采用DSP控制器的方案,利用TMS320C24x控制器的DSP結構及優化的微控制器外圍電路,采用智能控制策略,以獲得轉子位置和速度信息,從而取消轉子位置傳感器,對設計PMSM控制系統,降低系統成本,提高系統可靠性提供了一種新思路。












評論