泵站電機交流勵磁調速的控制技術

1引言
本文引用地址:http://www.104case.com/article/162443.htm為減少洪澇災害,我國在大江大河流域建設了許多電力排灌站。一般電力排灌站設計為固定揚程。在洪澇期間,外江水位超過設計揚程時,泵站被迫停機,使內河漬水不能及時排出,給國家和人民財產帶來嚴重損失。如果此時能使電機超同步運行如提速5%,則水泵揚程可提高10%左右,這可在很大程度上解決水泵因外江水位過高而被迫停機的問題,減少內河澇災損失。因此實現(xiàn)此類電機的超同步運行具有很大的社會與效益。
由于泵用電動機定子側供電電壓為高壓,在定子側采用變頻調速時,調速設備價格昂貴,且升速受供電電壓限制。如采用雙饋調速,則因泵機要求調速范圍有限(僅為±10%),變頻設備容量比在定子側調速要小得多,經濟上合算。采用雙饋調速的另一個重要優(yōu)點是:它從電網(wǎng)吸收的無功功率可通過調節(jié)勵磁電流的大小及相位進行調整,即電機的功率因數(shù)可調,還可進相運行。由于該類泵站機組數(shù)量大,所以采用此技術以后,對節(jié)約電能及改善當?shù)仉娋W(wǎng)功率因數(shù)將起到重要作用。
交流勵磁雙饋調速電機轉子變頻器既可選用交直交變頻器,也可選用交交(AC/AC)變頻器。由于交交變頻器低頻運行時性能優(yōu)于交直交變頻器,因此泵站電機雙饋調速采用交交變頻是十分合適的[1][2][3]。本文介紹采用三相零式交交變頻、以16位單片機為控制核心并采用現(xiàn)場可編程芯片作為存儲器與邏輯電路實現(xiàn)的調速系統(tǒng)設計方案,提出了以期望的功率因數(shù)為參數(shù)、對轉速進行反饋調節(jié)時轉子電流幅值、相位等給定值的計算方法,給出了系統(tǒng)的軟硬件設計。
2系統(tǒng)結構
雙饋調速系統(tǒng)由線繞電機M、勵磁變壓器T、交交變頻器及控制電路等構成。系統(tǒng)結構如圖1所示。
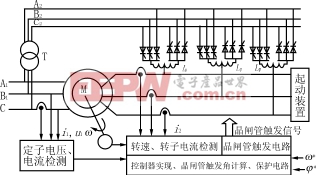
圖1泵站雙饋電機交流勵磁調速系統(tǒng)框圖
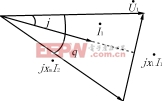
圖2電機矢量關系
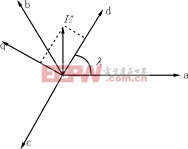
圖3兩相到三相矢量變換示意圖
交交變頻主電路在控制電路作用下實現(xiàn)向電機轉子供電(超同步運行)或將轉子能量回饋到電網(wǎng)(低同步運行)。為使轉子電流較為平滑、限制誤觸發(fā)瞬時短路電流,主電路中加入了平衡電抗器LP。
控制電路主要完成定子功率因數(shù)、轉子電流及轉速等檢測,并依據(jù)給定轉速、功率因數(shù)與相應實際值的差別,根據(jù)反饋控制的基本思想,按照一定的控制算法,計算轉子供電頻率、電流幅值與相位的期望值,進而確定各晶閘管的觸發(fā)角以實現(xiàn)對晶閘管的控制。實現(xiàn)系統(tǒng)在給定轉速(ω*)和給定功率因數(shù)角(φ*)附近的穩(wěn)定運行。
對于既定形式的主電路,其參數(shù)可依據(jù)電機基本數(shù)據(jù)如額定功率、輸入電壓、轉子感應電勢,及調速范圍要求等來確定。
3控制方法
如前所述,改變轉速是通過調節(jié)轉子的供電參數(shù)來實現(xiàn)的,即通過控制轉子的供電頻率、轉子電流的幅值與相位來調速。
31轉子供電頻率
設ω1為同步轉速對應的電源角頻率,ω為電機實際轉速對應的電角頻率,ωS為轉子供電角頻率。則穩(wěn)態(tài)時有:
ωS=ω1-ω
當實際轉速和期望轉速不同時,可調整轉子供電頻率使實際轉速向期望值靠擾。為使電機轉速平穩(wěn)變化,采用下式計算轉子供電頻率的給定值ωS*:
ωS*=ω1-αω*-(1-α)ω
這里0α≤1,α可隨轉速變化有所改變,特別是當實際轉速接近期望轉速時,可取α=1。
32轉子電流幅值與相位![]()
![]()
![]() 設穩(wěn)態(tài)時定子電壓空間矢量為,定子電流空間矢量為,轉子電流空間矢量為,不記定子電阻影響,有[4]
設穩(wěn)態(tài)時定子電壓空間矢量為,定子電流空間矢量為,轉子電流空間矢量為,不記定子電阻影響,有[4]![]() (1)
(1)
如果控制系統(tǒng)的功率因素角φ(超前φ記為負值,滯后為正)具有期望值φ*,并在運行中保持不變,則調節(jié)定子電流大小即可調節(jié)輸出有功大小,從而也可調節(jié)轉速。反過來,當對速度進行反饋調節(jié)時,速度調節(jié)器的輸出可認為是定子電流大小的期望值I1*。為保證實際功率因素角φ=φ*,應選擇轉子電流幅值與相位,使得對期望的I1*及φ*,電機矢量關系式(1)成立。
由圖2可知:
xmI2sinθ=x1I1cosφ
U1-x1I1cosφ=xmI2cosθ![]()
![]() 故選轉子電流幅值、與夾角θ的期望值分別為:
故選轉子電流幅值、與夾角θ的期望值分別為:![]()
![]() I2*=
I2*=![]() θ*=arcsin
θ*=arcsin
當φ*=0時,定子只從電網(wǎng)吸收有功功率,在泵機提速時可充分利用電機容量。







評論