基于CAN總線的多天線控制器設計及PID實現

方位數字化電路原理框圖如圖3所示。本文引用地址:http://www.104case.com/article/162435.htm
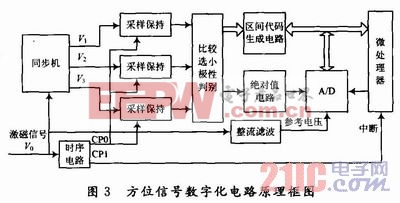
從圖2可以看出,在0~30°區間內正弦曲線可近似為線性區間,為進一步提高精度,可以按照正弦函數曲線對A/D轉換進行補償,以滿足精確測量的需要。同時,為避免因激磁電壓的波動引起A/D轉換后的數值在區間之間的跳動,A/D轉換器的參考電壓應與激磁電壓的幅度按比例浮動。
3 位置隨動旋轉編碼器接口設計
旋轉編碼器是隨動控制中常用的接口部件,這里選用增量式旋轉編碼器,它由涂有莫爾條紋的編碼盤和光電檢測裝置構成,編碼盤上涂有兩道相差90°的黑白相間隔柵,分別稱之為A道和B道。工作時,光電檢測器發出可見光照射在編碼盤上,當編碼盤旋轉時,光發射管裝置照過隔柵,光敏接收管便會產生通(斷)的脈沖輸出信號。由于A,B道相位差為90°,因此其輸出脈沖也有90°的相差。當旋轉編碼器正轉時,A信號超前B信號90°;反轉時,B信號超前A信號90°。
如果直接采樣A、B兩路信號,電路結構會比較復雜。為便于計算機處理,可將旋轉編碼器的A、B兩路信號進行適當變換,生成方向信號DIR和增量計數脈沖CLK。圖4給出了旋轉編碼器的接口電路以及相應的波形。為防止因機械轉動帶來的波形邊緣的抖動,接口電路的輸入應采用施密特型。
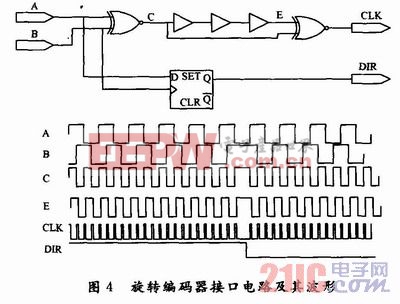
圖4中C點的方波周期是A或B信號周期的1/2。為了在手輪低速轉動時,防止由于A或B信號周期過大而影響計數器的正常工作,可將C點波形與經緩存器延遲后的波形E相異或,從而得到增量計數脈沖CLK,其周期應是C周期的1/2,即為A或B信號周期的1/4,實現A或B信號頻率的四倍頻細分。為便于計算機識別手輪的轉動方向,電路中增加了方向信號DIR,當旋轉編碼器正向轉動時,A信號超前B信號90°,此時DIR輸出為高電平;反之,DIR輸出為低電平。
4 天線的PID控制
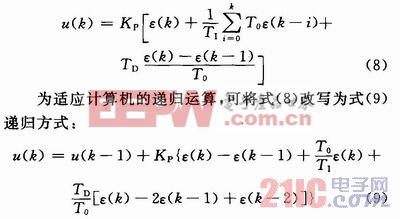
圖5給出了天線的PID控制原理。如圖5(a)所示,在連續控制系統中,PID的控制規律可以寫成如下形式:
式中:u(t)為PID控制器的輸出或稱為被控對象的控制輸入;ε(t)為偏差;Kp為比例系數;TI為積分時間常數;TD為微分時間常數。
為在數字系統中實現PID控制,需將連續PID控制規律離散成離散型PID控制規律,即用差分方程來表示:
天線的離散型PID控制方案如圖5(b)所示。在該方案中,天線的工作方式分為自動掃描和手動掃描兩種。自動掃描方式下,天線控制器選擇設定相應天線的掃描轉速。由于不同波段的天線尺寸不同,各個天線轉臺的轉動慣量也不盡相同,因此需要通過調整相應天線的比例積分和微分常數,來使天線的控制達到期望的特性。而在手動掃描時,天線控制器將手輪的轉動控制,經位置隨動旋轉編碼器變換為對天線的控制輸出,通過CAN總線實時傳遞給指定天線的本地控制組件,由本地控制組件中的PID控制算法實現對天線的手動控制,從而達到手動跟蹤目標之目的。
5 結語
CAN總線技術已在工業控制中得到廣泛應用。本系統采用CAN總線,結合天線方位的數字化接口設計,將分布式微處理器聯系起來,實現了多天線的數字化PID控制,簡化了天線控制系統的設計,保證了天線控制的精度與穩定性。










評論