基于CAN總線的多天線控制器設(shè)計(jì)及PID實(shí)現(xiàn)

摘要:為了實(shí)現(xiàn)對(duì)偵察雷達(dá)多部天線的計(jì)算機(jī)控制,天線控制系統(tǒng)采用了基于CAN總線的系統(tǒng)結(jié)構(gòu)。基于對(duì)天線方位信號(hào)數(shù)字化原理的分析,設(shè)計(jì)了位置隨動(dòng)旋轉(zhuǎn)編碼器接口電路,給出了天線控制系統(tǒng)的PID控制算法,通過(guò)調(diào)整PID參數(shù),較好地控制了天線的轉(zhuǎn)動(dòng),簡(jiǎn)化了天線控制系統(tǒng)的結(jié)構(gòu),實(shí)現(xiàn)了一個(gè)控制臺(tái)對(duì)多部天線的控制。
關(guān)鍵詞:CAN總線;天線方位;方位信號(hào);PID控制
O 引言
雷達(dá)偵察設(shè)備由于要對(duì)從幾百兆赫至幾十吉赫的頻段進(jìn)行偵察接收,為了保證天線的電氣特性,同時(shí)便于跟蹤不同波段的多個(gè)目標(biāo),往往采用多部天線。以往對(duì)天線的控制多采用相互獨(dú)立的方式,每一部天線有對(duì)應(yīng)的一套控制系統(tǒng),其結(jié)果不僅是設(shè)備量大,故障率高,而且操作起來(lái)也不方便。為了簡(jiǎn)化對(duì)多部天線的控制,可以利用CAN總線的優(yōu)勢(shì)。CAN(Controller Area Network)總線為多主總線,具有點(diǎn)對(duì)點(diǎn),一點(diǎn)對(duì)多點(diǎn)通信的功能,它采用非破壞性總線仲裁技術(shù),可以根據(jù)總線上不同節(jié)點(diǎn)的優(yōu)先級(jí)高(低)安排數(shù)據(jù)的傳輸次序,節(jié)省了總線仲裁時(shí)間,通信距離最遠(yuǎn)可達(dá)10 km(5 Kb/s),通訊速率最高可達(dá)1 Mb/s(40 m)。此外,CAN協(xié)議能夠?qū)νㄐ艛?shù)據(jù)進(jìn)行編碼,使得網(wǎng)絡(luò)內(nèi)的實(shí)際節(jié)點(diǎn)數(shù)可達(dá)100個(gè)以上。某雷達(dá)偵察設(shè)備中共有六部天線,對(duì)應(yīng)于六個(gè)不同的波段,每部天線作為一個(gè)節(jié)點(diǎn),操作臺(tái)作為上位節(jié)點(diǎn),通過(guò)設(shè)計(jì)靈活地控制軟件,完成對(duì)各天線掃描方式、掃描速度及掃描范圍的設(shè)定及PID控制。
1 CAN總線多夫線控制系統(tǒng)的組成
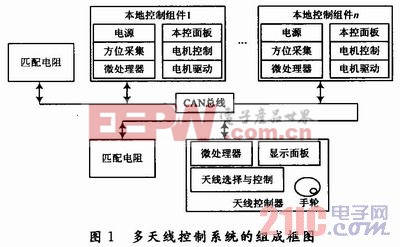
多天線控制系統(tǒng)由本地控制組件、CAN總線和天線控制器組成,如圖1所示。其中本地控制組件包括本控面板、電源、微處理器和電機(jī)驅(qū)動(dòng)電路,負(fù)責(zé)天線的位置信息采集和電機(jī)控制算法的實(shí)現(xiàn);CAN總線采用CAN 2.0B標(biāo)準(zhǔn)協(xié)議進(jìn)行數(shù)據(jù)傳輸,接口芯片采用SJA1000,完成物理鏈路層和數(shù)據(jù)鏈路層兩層功能;天線控制器包括顯示面板、控制按鍵、手輪、微處理器等,用于接收用戶操作指令,顯示指定天線的狀態(tài)和控制天線的運(yùn)動(dòng)方式。
在由CAN總線構(gòu)成的天線控制系統(tǒng)中,天線控制器和本地控制組件各分配一個(gè)固定的CAN網(wǎng)絡(luò)地址,天線控制器通過(guò)面板選擇所要控制的天線編號(hào),將該天線的工作方式(扇掃、環(huán)掃、手動(dòng))、工作參數(shù)(扇掃邊界、掃描速度)等發(fā)送到所選天線的本地控制組件,再由本地控制組件根據(jù)天線控制器給出的控制算法,實(shí)現(xiàn)對(duì)天線的控制,并將天線的當(dāng)前參數(shù)(方位、轉(zhuǎn)速、轉(zhuǎn)向)通過(guò)CAN總線傳送到天線控制器上顯示。手動(dòng)方式時(shí),所選天線的本地控制組件根據(jù)天線控制器手輪的控制信息和跟隨算法,實(shí)現(xiàn)對(duì)天線的手動(dòng)位置控制。










評(píng)論