基于CAN總線的多天線控制器設計及PID實現

2 方位傳感器的數字化設計
在對天線位置信息的采集中,方位傳感器采用同步機電路實現。其中,定子線圈加入工頻激磁電壓,轉子的三相電壓幅度受定子與轉子相對角度的調制,三個轉子線圈之間相互間隔120°放置。在模擬信號傳輸中,同步接收機會根據三相電壓幅度的變化跟隨同步機做同步旋轉,達到傳輸角度信號之目的。為了便于與微處理器的連接,輸出的方位信號還必須做數字化處理。
設同步機定子加激磁電壓Vo=Vmsinωt,三個轉子線圈的電壓方程為:
式中:K為轉子繞組與定子繞組的變壓比;θ為轉子相對于定子的轉角;ω為工頻激磁電壓的角頻率。
由此可知,在激磁電壓正峰值時,對三個電壓取值,則V1,V2,V3與轉角θ的關系為:
將轉角θ從0~360°劃分為12個區間,每個區間30°,則可將同步機三相電壓幅度隨轉子角度變化的曲線繪制如圖2所示。
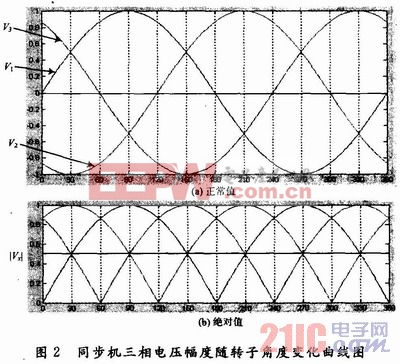
如果用V1-V2,V2-V3,V3-V1以及V1,V2,V3中絕對值最小的信號Vx的極性來表示這12個區間,則很容易得到各區間的二進制代碼,如表1所示。例如:當θ角在0~30°時,V1-V2為正,V2-V3為負,V3-V1為正,而此時V1的絕對值最小,即Vx=V1,其值為正,則該區間可以用(10 11)B表示。

進一步,對此時的Vx信號做歸一化處理后再進行反正弦運算,其結果是單調的,且計算出的角度值α介于0~30°之間。根據θ角所在的區間,就可求出當前天線的方位。
根據以上分析,可以將方位信號數字化過程簡述如下:在激磁工頻信號的正峰值點生成采樣脈沖信號CP0和微處理器中斷信號CP1,控制三路采樣保持電路同時對分壓后的同步機三相電壓進行采樣保持,選擇絕對值最小的一路信號送A/D轉換器,同時判斷其正負;區間代碼生成電路根據對三路采樣信號的比較和最小信號的正負,確定θ角所處區間的代碼;微處理器響應中斷,啟動A/D轉換,求得α值,同時讀取θ角所處區間代碼,根據表1給出的區間計算公式,確定θ角的具體數值送本地面板顯示,并通過CAN總線上傳天線控制器。










評論