多傳感器信息融合技術(shù)在車載自診斷系統(tǒng)的研究

多傳感器融合判定原理如圖1所示。本文引用地址:http://www.104case.com/article/162419.htm

2 Bayes推理方法
Bayes推理方法算法如下:汽車運(yùn)行過程可以看成是一個隨機(jī)過程,根據(jù)先驗知識對故障做出概率估計稱為先驗概率,記為P(ωi),(i= 0,1,2,…,c);P(ω0)表示正常工況的概率,P(ωi),(i=1,2,…,c)表示c類故障發(fā)生的概率。將故障樣本X=(x1,x2,…,xn)作為輸入模式樣本,P(X|ωi)(i=1,2,…,c)表示輸入模式的c類條件概率密度函數(shù)。根據(jù)Bayes公式:
式中:P(ωi|X)是已知條件下ωi出現(xiàn)的概率,稱為后驗概率。因此如果滿足下面Bayes規(guī)則,則x∈ωi,且:![]()
主觀Bayes方法中,每條推理規(guī)則可以表示為:IF[規(guī)則名]THEN H(LS,LN)。其中,LS,LN(≥0)分別稱為充分性度量和必要性度量(其數(shù)值由專家定),主觀Bayes方法推理過程就是根據(jù)證據(jù)事件的概率P(E),利用規(guī)則(LS,LN),事件的系統(tǒng)性能斷言的先驗概率P(H)更新為后驗概率P(H|E),同時H又作為新規(guī)則的證據(jù),結(jié)合新的規(guī)則(LS,LN),進(jìn)一步計算出新的后驗概率。
3 實例
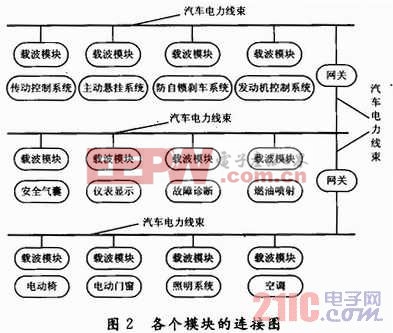
下面用一個汽車的具體實例來說明,如何采用Bayes方法進(jìn)行故障診斷。汽車系統(tǒng)運(yùn)行中經(jīng)常出現(xiàn)各種各樣的故障,執(zhí)行元件故障是其中最常見的一種情況。引發(fā)故障的原因很多,大致歸納是由傳動控制系統(tǒng)、主動懸掛系統(tǒng)、防自鎖剎車系統(tǒng)、發(fā)動機(jī)控制系統(tǒng)、安全氣囊系統(tǒng)、儀表顯示系統(tǒng)、各個故障診斷系統(tǒng)、燃油噴射系統(tǒng)、電動車門系統(tǒng)、空調(diào)系統(tǒng)、照明系統(tǒng)、電動椅系統(tǒng)、排放控制系統(tǒng)、車身穩(wěn)定系統(tǒng)、防盜系統(tǒng)的匹配、汽車噪聲的檢測這16個部分的不同故障可能的原因所引起。
從圖2可看出,引起執(zhí)行元件故障的因素有很多種。其中,執(zhí)行系統(tǒng)動作的不穩(wěn)定是故障的主要現(xiàn)象之一,排氣不良、工作油質(zhì)不良等多種故障都可能導(dǎo)致執(zhí)行元件的動作不穩(wěn)定,因此這種故障是連鎖性質(zhì)的,不是簡單的一一對應(yīng)關(guān)系。通過對汽車系統(tǒng)這類故障的統(tǒng)計,可以得到各部位發(fā)生故障的幾率具有一定的先驗統(tǒng)計規(guī)律,上例的簡單統(tǒng)計如表1所示。












評論