直流電機PWM調速系統中控制電壓非線性研究

0 引言
由于線性放大驅動方式效率和散熱問題嚴重,目前絕大多數直流電動機采用開關驅動方式。開關驅動方式是半導體功率器件工作在開關狀態,通過脈寬調制PWM控制電動機電樞電壓,實現調速。目前已有許多文獻介紹直流電機調速,宋衛國等用89C51單片機實現了直流電機閉環調速;張立勛等用AVR單片機實現了直流電機PWM調速;郭崇軍等用C8051實現了無刷直流電機控制;張紅娟等用PIC單片機實現了直流電機PWM調速;王晨陽等用DSP實現了無刷直流電機控制。上述文獻對實現調速的硬件電路和軟件流程的設計有較詳細的描述,但沒有說明具體的調壓調速方法,也沒有提及占空比與電機端電壓平均值之間的關系。在李維軍等基于單片機用軟件實現直流電機PWM調速系統中提到平均速度與占空比并不是嚴格的線性關系,在一般的應用中,可以將其近似地看作線性關系。但沒有做深入的研究。本文通過實驗驗證,在不帶電機情況下,PWM波占空比與控制輸出端電壓平均值之間呈線性關系;在帶電機情況下,占空比與電機端電壓平均值滿足拋物線方程,能取得精確的控制。本文的電機閉環調速是運用Matlab擬合的關系式通過PID控制算法實現。
1 系統硬件設計
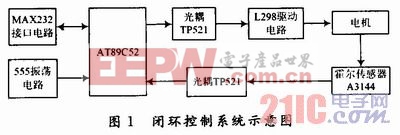
本系統是基于TX-1C實驗板上的AT89C52單片機,調速系統的硬件原理圖如圖1所示,主要由AT89C52單片機、555振蕩電路、L298驅動電路、光電隔離、霍爾元件測速電路、MAX 232電平轉換電路等組成。
2 系統軟件設計
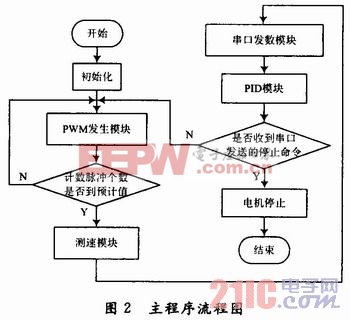
系統采用模塊化設計,軟件由1個主程序,3個中斷子程序,即外部中斷0、外部中斷1,定時器0子程序,PID算法子程序,測速子程序及發送數據到串口顯示子程序組成,主程序流程圖如圖2所示。外部中斷0通過比較直流電平與鋸齒波信號產生PWM波,外部中斷1用于對傳感器的脈沖計數。定時器0用于對計數脈沖定時。測得的轉速通過串口發送到上位機顯示,通過PID模塊調整轉速到設定值。本實驗采用M/T法測速,它是同時測量檢測時間和在此檢測時間內霍爾傳感器所產生的轉速脈沖信號的個數來確定轉速。由外部中斷1對霍爾傳感器脈沖計數,同時起動定時器0,當計數個數到預定值2 000后,關定時器0,可得到計2 000個脈沖的計數時間,由式計算出轉速:
n=60f/K=60N/(KT) (1)
式中:n為直流電機的轉速;K為霍爾傳感器轉盤上磁鋼數;f為脈沖頻率;N為脈沖個數;T為采樣周期。
3 實驗結果及原因分析
3.1 端電壓平均值與轉速關系
3.1.1 實驗結果
實驗用的是永磁穩速直流電機,型號是EG-530YD-2BH,額定轉速2 000~4 000 r/min,額定電壓12 V。電機在空載的情況下,測得的數據用Matlab做一次線性擬合,擬合的端電壓平均值與轉速關系曲線如圖3(a)所示。相關系數R-square:0.952 1。擬合曲線方程為:
y=0.001 852x+0.296 3 (2)
由式(2)可知,端電壓平均值與轉速可近似為線性關系,根椐此關系式,在已測得的轉速的情況下可以計算出當前電壓。為了比較分析,同樣用Matlab做二次線性擬合,擬合的端電壓平均值與轉速關系曲線如圖3(b)所示。相關系數R-square:0.986 7。








評論