基于多傳感器數據融合的火災預警系統

3.2 D-S證據理論數據融合方法在多傳感器火災早期探測上的應用
多傳感器數據融合的實質是在同一鑒別框架下,利用Dempster合并規則將各個證據體合并成一個新的證據體,而產生的新的證據體就表示了融合所得的信息,然后根據決策規則進行決策。用D-S理論實現多傳感器數據融合方法見圖3。本文引用地址:http://www.104case.com/article/162334.htm

在多傳感器數據融合系統中,首先初始給一次基本可信度的分配。然后,每當收到一次傳感器的信息,就進行一次基本可信度的分配,隨著信息的不斷傳回,再不斷地對基本可信度進行分配。最后,依據決策規則得出決策結果。本系統探測的3個對象,根據探測值不同,對斷定是否發生火災的可信度值也不同。表2中對各個探測對象在不同范圍內的值,賦予了不同的信任值,這些信任值不是精確得到的概率值,而是由經驗和我校實驗室火災統計數據得到的。
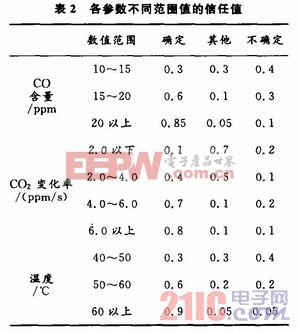
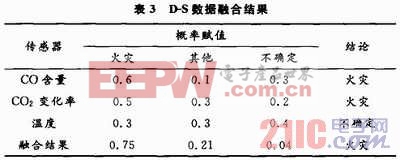
當CO濃度超過10 ppm時,確定發生火災的概率較小;當超出20 ppm時,確定為火災的準確率可高達85%。從我校實驗室CO2監測數據來看,即使濃度高達1 500 ppm以上,也有可能是房間人數突然增多導致的,所以只從CO2的含量探測數值來斷定火災,會有很大誤差。但根據圖1的結果得知,火災發生時CO2含量是一直在遞增的,且在火災初始成長期間,曲線斜率(即增長速度)的變化范圍是2.5~6.5 ppm/s,因此本系統將CO2的變化率作為數據融合對象。同樣,隨著溫度值變高,能斷定是火災的概率也越大。以CO含量為15~20ppm,CO2變化率是2.0~4.0 ppm/s,溫度為40~50℃這個情況為例,用D-S方法進行數據融合,從表3可以看出,不確定性的概率下降到了可以忽略的程度,即系統的不確定性明顯降低;并且原來的單個傳感器不能準確判定是否發生火災,融合后正確判斷的概率增大,即對來自3個不同傳感器的數據融合提高了系統的判別火災能力。
4 結語
傳感器在采集信息過程中受多種因素的影響,不確定性是普遍存在的。Dempster-Sharer合并規則較好地解決了這種不確定性問題,將多個傳感器獲得的信息準確地合成為對目標(是否火災)判定的一致性,增加了系統的正確決策能力。但是,這種方法的使用仍然存在一些局限性。即每一傳感器對目標判決的概率賦值,需要依靠經驗和數據積累不斷進行更準確的設置。












評論