基于 XC866 的步進電機閥門控制系統

2硬件設計重點
① 步進電機驅動電路
在本設計中,我們選用了三洋公司(SANYO)電機驅動芯片LB1836M(見圖2)。本文引用地址:http://www.104case.com/article/162245.htm
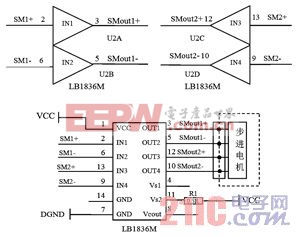
LB1836M是低飽和雙通道雙向電機低電壓驅動器件,引腳INl、IN2、IN3和IN4是步進脈沖的輸入端。
OUT1、OUT2、OUT3、OUT4為步進脈沖的輸出端,分別與步進電機電機對B、A、/B、/A相連接。LBl836M輸入端的四個步進脈沖可由單片機的P3.1、P3.0、P3.3、P3.2四路PWM通道產生。四個I/O口輸出的相位關系為P3.0與P3.2反相,P3.1與P3.3反相,P3.0與P3.1相差π/2。
② 閥門控制電壓采樣電路
由于本設計中采用了一個0~2.5V的電壓信號調控閥門的打開程度,單片機利用定時器中斷對電壓進行采樣,然后傳送到ADC模塊再進行控制。電壓采樣電路如圖3所示。
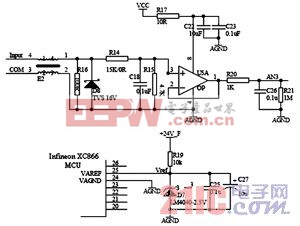
圖3 電壓采樣電路
電壓信號由Input端輸入經過電阻分壓,然后通過一個電壓跟隨器,這時1點電壓與3點電壓相同;然后,將信號傳送到XC866的P2.4端口,再送到ADC模塊進行電壓采集。VAREF引腳為XC866的ADC參考電壓介入口,VAGND為ADC接地。參考電壓為2.5V,用LM4040的穩壓二極管將電壓穩定在2.5V,電容的設計是用來減少干擾。
③ 軟件設計
本設計中步進電機的控制脈沖信號,是由軟件編程控制XC866產生的,用C語言編寫。軟件的主要流程是:系統啟動后,首先進行單片機和外圍器件的初始化,I/O口進行置位,設置定時器。定時器產生中斷,對目標電壓值進行采樣,與當前位置的電壓分別經過A/D轉換(參考電壓為2.5V),再進行比較,求出二者的差及符號。當差值在允許的誤差范圍內,步進電機不動;當差值超出允許誤差范圍時,從XC866的四個I/O口輸出所需數量的脈沖信號,控制電機轉動。為防止在A/D轉換中出現的誤差及步進電機本身的誤差的存在,造成電機振蕩。因此,在程序設計時,規定一定的誤差范圍。









評論