X射線檢測儀控制系統的設計

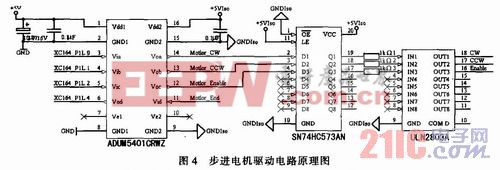
步進電機驅動電路主要由微控制器、數字隔離器、鎖存器和放大電路組成,利用微控制器的I/O端口,通過數字隔離器ADUM5401隔離,經74HC573鎖存,由ULN2803放大來驅動步進電機驅動器,如圖4所示。同時收集步進電機驅動器的End信號,以判斷電機定位是否完成,確保電機正常運行。本文引用地址:http://www.104case.com/article/162223.htm
2.3 高壓控制單元
X射線源的控制實質上是控制X射線管的管電壓和燈絲電流,也就是控制管電壓高壓電源和燈絲電流電源。本系統采用杭州源谷TXR1010系列X射線高壓電源,它需要兩路0~10V電壓分別控制管電壓、燈絲電流,同時需要對實際管電壓、燈絲電流進行采樣,檢測高壓電源是否正常工作。而X射線的穩定性對成像質量相當重要,所以需要選擇一款高性能DAC做為高壓電源0~10 V模擬量輸入,一款高性能ADC對高壓電源進行模擬量采樣。
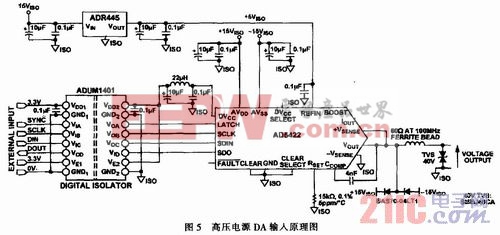
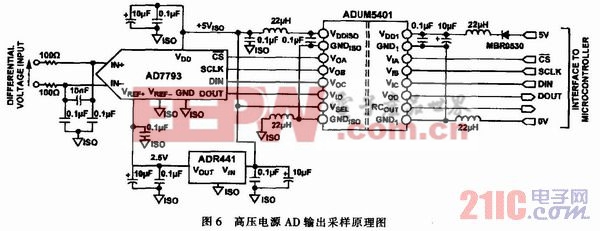
AD5422是一款單通道16 bit DAC,通過軟件可選擇其輸出配置,在電壓模式下其輸出選擇范圍為5 V,10 V,±5 V和±10 V;在電流模式下其輸出選擇范圍為4~20 mA,0~20 mA和0~24 mA。因此選擇這款DAC作為X射線高壓電源管電壓、燈絲電流的控制輸入,原理圖如圖5所示。而AD7793適合高精度測量應用的低功耗、低噪聲、完整模擬前端,內置一個低噪聲24位∑-△型ADC,其中含有3個差分模擬輸入,還集成了片內低噪聲儀表放大器,可直接輸入小信號。因此選擇這款ADC對實際管電壓、燈絲電流進行采樣,原理圖如圖6所示。
3 軟件設計
X射線檢測儀控制系統是在MCU基礎上進行開發的,其軟件設計也就是對MCU進行程序編寫。X射線檢測儀控制系統由4個單元組成,所以本系統軟件設計則是對這4個單元MCU進行程序編寫。從各個單元實現功能上分析:運動控制單元和高壓控制單元通過CAN總線接收計算機的控制命令,面板控制單元通過CAN總線來發送搖桿與按鈕狀態信息給計算機,因此程序編寫可以分為數據接收和數據發送兩種模式。
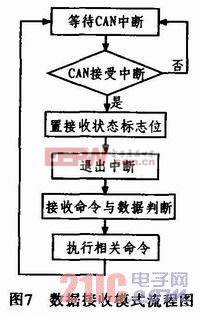
數據接收模式是指MCU不會主動發出控制指令,只有通過CAN總線接收到計算機控制指令后,才會進行相關操作,其流程圖如圖7所示。例如對步進電機進行控制,運動控制單元會一直等待著計算機的控制命令(即CAN接收中斷),如果有控制命令產生,則進入CAN中斷,置接收狀態標志位,接著退出中斷,然后判斷相關指令是否為控制步進電機,如果是,則對步進電機進行控制。
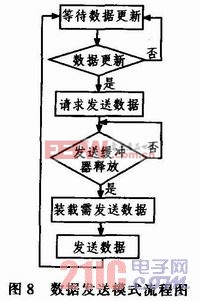
數據發送模式是指當狀態信息有數據更新時,將通過CAN總線把更新的狀態發送給計算機,其流程圖如圖8所示。例如當有一狀態按鈕按下,這時MCU會檢測到這個變化,同時去請求數據的發送,如果CAN發送緩沖器釋放,則裝載需要發送的狀態數據,然后通過CAN總線發送到計算機。
4 總結
X射線檢測儀控制系統已經實現并完成聯調,滿足了X射線檢測儀對控制系統可靠性和靈活性等高要求。同時實現了控制系統各單元相對獨立,各單元之間的連線簡潔,系統操作簡單,使用可靠,在使用中取得了良好的效果。由于微控制器、數字隔離器、CAN總線、冗余設計、高精度模數/數模轉換器等器件與技術的應用,使X射線檢測儀的穩定性、抗干擾能力、智能控制水平進一步提高。













評論