模糊PID控制器的設計與仿真研究

3 SIMULINK仿真
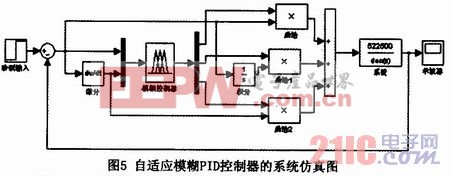
打開MATLAB文件編輯器,編寫M文件。在M文件中創建模糊控制系統接口,增加模糊語言變量(二個輸入、三個輸出),并設定各變量的論域及模糊推理規則,給定輸入,根據模糊推理得到輸出。編寫出模糊控制規則fuzzypid.fis。運行所編寫的模糊控制規則,并將控制規則導入工作空間。在MATLAB/SIMULINK環境下,建立仿真模型,并將Fuzzy Logic Controller模塊的參數設定為fuzzypid.fis,就建立了系統的模糊PID參數自調整系統。
設被控對象的傳遞函數為
建立系統的SIMULINK模型如圖5所示。本文引用地址:http://www.104case.com/article/162201.htm
設定PID參數的初始值分別為kp=0.35,ki=0.0,kd=1,并在第0.32s時加上數值為1的強干擾,采用模糊自適應PID控制的階躍響應如圖6所示。
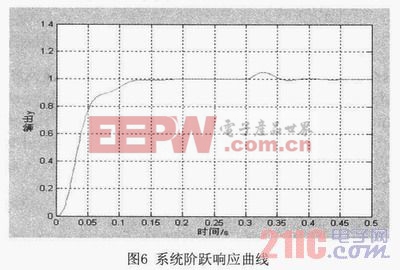
從仿真結果可以看出,模糊自適應PID控制器系統具有良好的快速性和穩態控制精度,并且抗干擾能力強。在常規PID算法的基礎上,通過計算當前系統誤差e和誤差變化率ec,應用模糊控制推理系統,查詢模糊矩陣表對系統進行參數調整,在動態過程中改變PID的參數,較好地發揮了兩種控制方式的優點,提高了系統的控制質量。同時,在系統仿真實驗過程中,可以看出應用SIMULINK仿真軟件的方便之處,仿真簡單、速度快,而且模糊控制規則以及系統的論域、隸屬度函數調整方便,容易實現。
4 結語
采用模糊自適應PID控制算法,系統的響應速度加快,控制精度提高,穩態性能變好,而且幾乎沒有超調和震蕩,魯棒性好。這是單純的PID控制難以實現的,而且采用模糊PID控制的顯著特點是在同樣精度要求下,系統的過渡過程時間變短,靈敏度提高,這些具有重要的實際應用價值。

pid控制器相關文章:pid控制器原理








評論