CAN總線技術在工業碼垛機器人控制系統中的應用研究

目前在用的工業碼垛機器人種類繁多,但根據其多軸控制系統的技術特點一般可分為三種類型:1)基于PLC的多軸控制系統;2)基于PC的多軸控制系統;3)基于總線的多軸控制系統。其中,總線控制系統具有數字信號傳輸、系統完全開放等優點,得到廣泛的應用。筆者通過研究發現,基于現場總線,尤其是CAN總線的工業碼垛機器人在實際應用中具有便于組網、性價比高、擴展性強等特點,在大工業生產中具有廣闊的發展前景。
本文引用地址:http://www.104case.com/article/162196.htm工業碼垛機器人
筆者所在科研團隊開發的新型工業碼垛機器人(機構簡圖如圖1所示),其主體機械結構是基于平衡吊原理的七桿機構,具有承載力大、穩定性好、結構緊湊、節省能耗等特點。機器人的動力由四臺交流伺服電機提供,分別負責機器人沿水平方向、沿垂直方向的直線運動,繞基座垂直軸的旋轉運動和繞抓手轉軸的旋轉運動。四臺電機既可單控,也可群控,大大簡化了路徑規劃算法。
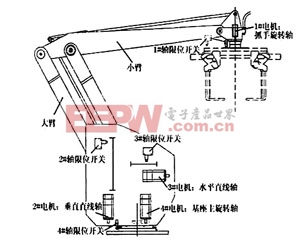
圖1 新型工業碼垛機器人機構簡圖
現場總線和CANopen
在工業控制領域,采用現場總線的最大優點是可以節約連接導線、維護和安裝費用。同時,現場總線能夠傳送多個過程變量,而傳統的4~20mA控制回路一般只能攜帶一個過程變量。采用現場總線后,在傳輸變量過程的同時,儀表的標識符和簡單的診斷信息也可一并傳送。采用現場總線的設備還具有更好的兼容性和擴展性。幾種常見的現場總線性能如表1所示。
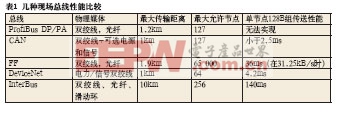
由上表可以看出,CAN總線在數據傳輸方面功能強大、性能優越,另外CAN總線傳輸速率較快,適用于大批量運動控制信息的實時交換處理。此外,CAN作為一種標準化的嵌入式網絡,具有高度靈活的配置能力,從而在工業領域獲得廣泛應用。
CANopen協議是CAN-in-Automation(CiA)定義的標準之一,在發布后不久就獲得了廣泛承認。在工業技術十分先進的歐洲,CANopen協議被認為是在基于CAN的工業系統中占據領導地位的標準。依靠CANopen協議的支持,可以對不同廠商的設備通過總線進行配置。CANopen協議使開發人員從CAN相關事務的繁瑣處理中解放出來,例如,位定時以及執行相關的功能。它提供了針對實時數據、組態數據以及網絡管理數據的標準化通信對象,方便用于面向運動的機器控制網絡。
硬件設計與實現
本工業碼垛機器人的控制系統采用集散控制結構(見圖2),選擇高精度、大功率交流伺服電機作為主要執行器件。所選伺服電機電氣性能好、響應速度快、變速時間短,具有較高的位置控制精度,為提升機器人的性能水平奠定了基礎。需要指出的是,所選電機的伺服驅動器均具有CAN總線控制模式驅動功能且具有CANopen協議所需的完備對象字典,方便了筆者所在科研團隊組建機器人運動控制網絡。
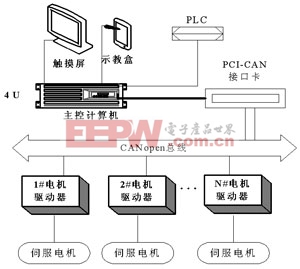
圖2 工業碼垛機器人運動控制系統圖

伺服電機相關文章:伺服電機工作原理










評論