實時控制系統(tǒng)接口設(shè)計

2.1 “引導”和“允許手控”控制信號的建立和清除
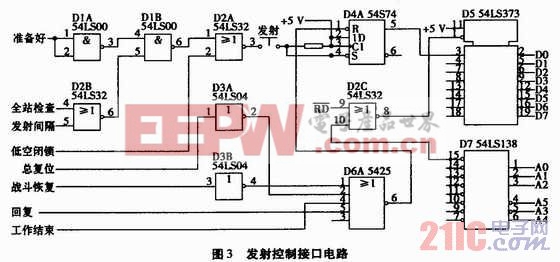
圖1中,D6、D7(54LS373)分別為輸入、輸出接口芯片,構(gòu)成控制接口電路與計算機的輸入、輸出通道。136接收并鎖存標志系統(tǒng)狀態(tài)的開關(guān)信號,供計算機實時讀取,以控制系統(tǒng)進入相應的工作狀態(tài);D7則輸出系統(tǒng)的狀態(tài)信息給控制接口電路。
系統(tǒng)設(shè)定開機的初始狀態(tài)為引導狀態(tài),此時D7的輸出狀態(tài)量“引導斷開”信號為低電平,從而保證了無論手輪拉出或推入都會在D3A(54LS00)的輸出端形成“引導”狀態(tài)量送往計算機,只是當手輪拉出時,微動開關(guān)K1斷開,K1的2點被電阻R5拉成低電平,故沒有“允許手控”信號形成,只有當手輪推入時,微動開關(guān)K1閉合,“允許手控”信號形成,并通過D6送往主機,并通過付機通知跟蹤組合可隨時控制系統(tǒng)進入跟蹤狀態(tài)。
手輪推入為“允許手控”信號的建立時刻,它的建立不應清除先前建立的“引導”信號,即此時系統(tǒng)仍工作在“引導”狀態(tài)。
當輸出接口芯片D7(54LS373)的輸出狀態(tài)量“引導斷開”信號變高時,說明跟蹤組合已進入了跟蹤狀態(tài),此時D3A(54LS00)的輸出端變低,即“引導”信號被清除,使系統(tǒng)脫離“引導”狀態(tài)。
在“跟蹤”狀態(tài)下再次進入“引導”狀態(tài)時,只需將手輪拉出,這時,送入計算機的“引導”信號變高,從而控制系統(tǒng)再次進入“引導”狀態(tài)。
2.2 引導控制脈沖的產(chǎn)生
在引導狀態(tài)下,轉(zhuǎn)動ε、R、β引導手輪(圖中只畫出了ε平面),便可實現(xiàn)對天線的位置控制。引導手輪轉(zhuǎn)動時,帶動減速機構(gòu)和各自的光電碼盤轉(zhuǎn)動,光電碼盤輸出的光電脈沖,經(jīng)整形電路、方向判別電路的處理,完成對光電脈沖的整形和方向的判別,即當手輪正轉(zhuǎn)時,輸出正轉(zhuǎn)脈沖,反轉(zhuǎn)時輸出反轉(zhuǎn)脈沖。ε、R、β三個平面的正、反轉(zhuǎn)脈沖分別送到可編程接口芯片8253,8253是一種通用的計數(shù)器/定時器,它具有三個功能完全相同的計數(shù)器和一個控制寄存器。所以譯碼器D9(54LS138)需分配四個口地址給一片8253芯片。三個引導手輪產(chǎn)生的六路脈沖分別送到兩片8253的六個計數(shù)器的輸入端(圖中只畫出了ε平面即一片8253),系統(tǒng)初始化時,計算機通過程序?qū)?253置為外部事件計數(shù)器,并給每個計數(shù)器賦以計數(shù)初值,工作時,六個計數(shù)器分別對六路脈沖進行遞減計數(shù),計算機用閂鎖操作的方式讀人正在計數(shù)狀態(tài)的計數(shù)值,形成ε、R、β平面坐標位置的控制量。
2.3 “搜索”控制信號的建立和清除
系統(tǒng)在引導狀態(tài),可用“搜索”的方式控制天線發(fā)現(xiàn)目標。由圖1可見,搜索狀態(tài)量的建立是通過按鈕S1和觸發(fā)器D1A(54S74)完成的,54S74是兩個獨立的正沿觸發(fā)的D型觸發(fā)器,每個觸發(fā)器都有獨立的直接置位、直接復位的功能。為了信號的可靠傳輸,我們將54S74接成直接置位、直接復位的工作方式,它的輸入端接收開關(guān)或按鈕的動作,當置位條件滿足時,其輸出端便建立起相應的狀態(tài)量,并通過接口芯片D6(54LS373)送入計算機,從而控制天線進行搜索。D1A(54S74)的復位端(第1腳)接有由或非門D2A(54LS25)構(gòu)成的狀態(tài)量清除電路,當系統(tǒng)“復位”時,或按下“搜索停止”時,均可使觸發(fā)器D1A(54S74)復位,以清除先前建立的“搜索”狀態(tài)量。
3 跟蹤控制接口電路設(shè)計
3.1 跟蹤控制信號的建立和清除
系統(tǒng)在引導狀態(tài)下,當雷達天線發(fā)現(xiàn)目標后,可分別將引導組合的ε、R、β引導手輪推入,產(chǎn)生三個平面的“允許手控”指令,經(jīng)由主機、付機從而控制天線進入跟蹤狀態(tài)。在跟蹤狀態(tài),ε、R、β三個平面均有“手控”“自動”、“天線自動”三種工作方式,其跟蹤精度依次而高。圖2為ε平面跟蹤控制電路圖。由圖可見,“允許手控”、“手控”、“自動”、“天線自動”這四個控制信號組成一個有序的狀態(tài)量鏈條,它們的建立必須依從以下的順序依次建立,而不能超越。
允許手控→手控→自動→天線自動.
其中,“允許手控”是基礎(chǔ),當將引導手輪拉出時,上述鏈條立即失效,系統(tǒng)又回到引導狀態(tài)。本文引用地址:http://www.104case.com/article/162179.htm
由圖2可見,當按下“手控”按鈕S1時,可建立“手控”控制信號,控制系統(tǒng)由“引導”狀態(tài)進入“手控”狀態(tài),或由“自動”、“天線自動”狀態(tài)回到“手控”狀態(tài)。

伺服電機相關(guān)文章:伺服電機工作原理







評論