基于LPC2124的超聲波電機驅動控制系統

1.3.2 溫度采集模塊
由于超聲波電機的諧振頻率除與電機結構密切相關外,與電機工作環境也很相關,而溫度是其中非常重要的一個因素。因此本系統中加入了溫度傳感器,來檢測環境溫度,用于研究溫度因素對電機啟動的影響。溫度傳感器芯片選用了LM75芯片,其中SDA和SDL與LPC2124的SDA和SDL相連,且需接上拉電阻。LM75是I2C接口的溫度傳感器,測量溫度范圍為-55~125℃,LM75已經把當前溫度轉換為數字值,LPC2124可以直接讀出使用。LM75上電后即可正常工作,無需發送命令去設置或初始化啟動。電路系統中將LM75芯片的A0~A2引腳接地,所以其從機地址為0X90,在LPC212A采用主模式I2C的數據接收模式時,LM75從機被讀的地址為0X91。LM75內部有4個寄存器,這4個寄存器是通過I2C擴展地址進行訪問的,它們的擴展地址為0X00、0X01、0X02、0X03。溫度值的寄存器地址為0X00,這是一個16位的只讀寄存器,其溫度值只使用了D15~D7位表示,低7位數據無效。在讀溫度寄存器時,連續讀出兩字節數據,而不用擔心LM75內部自動增加子地址。其中D15位為0時表示正溫度,為1時表示負溫度。D14~D7為8位溫度值,最低有效位等于0.5℃。所以當溫度為正時,溫度T=(D14-D7)/2;當溫度為負時,需要對(D14~D7)取補碼,所以溫度T=(-(D14-D7)+1)/2。
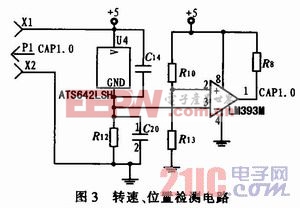
1. 3. 3 轉速、位置檢測模塊
轉速和位置檢測電路如圖3所示。目前在超聲波電機轉速或位置方面的研究中,由于光電編碼器精度高等原因,所以采用對多的方法就是利用光電編碼器來檢測轉速或位置。但如果在震動劇烈等相對惡劣環境下,光電編碼器一般就不可靠了,所以本文采用霍爾傳感器ATS642 LSH結合安裝在電機轉子上的凹凸齒輪來檢測轉速或位置。ATS642LSH輸出的是電流信號,其在電機每轉過一個齒輪時,輸出的電流發生變化,輸出電流的典型值是高為14 mA,低為7 mA。利用一個100 Ω的電阻(圖3中R12),將電流轉換為電壓信號。此時,高電平為1.4 V,低電平為0.7 V,與1 V的參考電壓比較,即可將電壓信號轉換為方波信號。將該方波信號連接到LPC2124,控制器就可以利用方波信號的頻率和個數,推算出電機的轉速和位置狀況。本文引用地址:http://www.104case.com/article/162117.htm
2 PWM的控制
LPC2124的脈寬調制器建立在PWM專用的標準定時器之上,通過匹配寄存器及一些控制電路來實現PWM的輸出。脈寬調制器共有7個匹配寄存器,可實現6路單邊沿控制PWM輸出或3路雙邊沿控制PWM輸出,或兩者的混合輸出。
由于不能同時產生四路依次相差90°的PWM信號,所以只輸出兩路方波信號,經或非門反相產生另外兩路信號。通過PWM240UT函數(如下)設置LPC2124的PWM相關控制寄存器后,P31、P33(PWM2、PWM4)輸出兩路方波信號。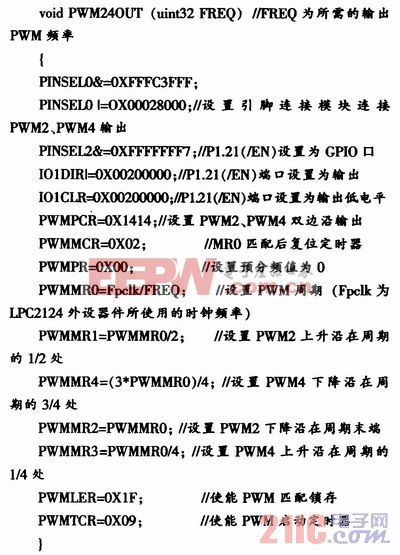
利用LPC2124內置的10位逐次逼近式A/D轉換器,調節微調電阻改變輸入的電壓值,來調節輸出的PWM頻率。由于是10位A/D,所以頻率線性調節范圍(f,f+1 023δ),其中f為輸出的最低頻率,δ為調頻精度。f和δ根據電機情況設定相應的值。本課題中,電機諧振頻率為33.67 kHz,設置的最低頻率f為30 kHz,δ為10Hz,頻率調節范圍為30 000~40 230 Hz。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理










評論