使用SPCE061A單片機的二級倒立擺控制系統

SPCE061A有8路可復用10位ADC通道,其中一路通道(MIC_In)用于語音輸入,模擬信號經過自動增益控制器和放大器放大后進行A/D轉換。其余7路通道(Line_In)和IOA[0~6] 管腳復用,可以直接通過引線(IOA[0~6])輸入,用于將輸入的模擬信號(如電壓信號) 轉換為數字信號。二級倒立擺系統中的六個狀態變量電壓變化范圍為—12—+12伏,而單片機ADC模塊的要求輸入電壓變化范圍為0—+3.3伏,因此六個狀態變量經電壓轉換電路后分別接至
SPCE061A單片機的IOA0~IOA5。SPCE061A UART模塊提供了一個全雙工標準接口,用于完成SPCE061A與外設之間的串行通訊。UART模塊的接收管腳Rx和發送管腳 TX 分別與IOB7和IOB10共用。本系統采用的是半雙工的通訊方式。IOB7和IOB10與MAX485芯片相連接,并再經485232轉換器與上位機串行口相連。實現狀態變量在上位機的顯示以及由上位機設置反饋參數的功能。SPCE061A為音頻輸出提供兩個DAC通道, 0—3.3毫安模擬電流信號通過DAC1管腳輸出。經狀態反饋運算后所得到的控制量以0—3.3毫安模擬電流信號輸出,此電流信號經電流電壓轉換電路,在經電壓倍放電路后變為—12—+12V。輸至功放去控制PWM脈寬調制進而控制執行電機,使二級倒立擺達到動態平衡狀態。

2.3 控制系統軟件設計:
上位機應用VC++編寫的串口程序。其上位機的應用界面如下圖所示:
從圖中可以看出,第一行表示的是測量的六個狀態變量,分別是小車位置,小車速度,一擺的角度,一擺的角速度,二擺的角度,二擺的角速度。其數據可以實時的顯示出來,這樣就可以觀察數據是否有異常的情況。第二行就是根據實際情況給單片機發送數據,從而達到設置參數的目的。在狀態反饋的控制策略中,分別設置的是六個狀態反饋系數。
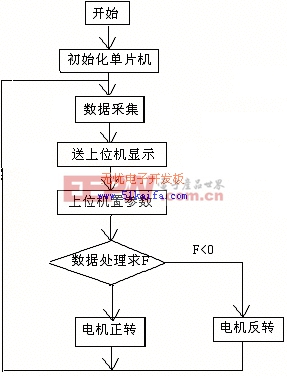
單片機控制系統的軟件設計是采用的是C語言,C的結構化設計特點是簡潔、明快,有豐富的庫函數和較好的調試手段,還具有移植性好,上手快等特點。在控制軟件中包含主程序、中斷程序和各種子程序,下面介紹應用狀態反饋實現對倒立擺穩定控制的程序流程圖。
狀態反饋需要測量六個量,上位機需要給單片機設置六個反饋參數。程序流程圖如下:
3. 結束語
試驗證明,本控制系統能方便快捷的找到使二級倒立擺系統達到動態平衡的狀態反饋系數,簡化控制系統的調試任務,得到了較為理想的試驗效果。
本文作者創新點:找到使二級倒立擺系統達到動態平衡的狀態反饋系數,研究了狀態空間法在本系統中的應用。









評論