高精度低成本車用超聲波傳感器的研制

時間測量
時間測量中采用的超聲波信號周期為25μs,卻需要一個相當于在20°C 時約9mm 波長的超聲波信號源。為了確保精度,需要一個波長檢測器。超聲波信號源由一個信號發生器和一個過零檢測器的電路組成。任意信號發生器由一個可存放任意波形的16Kbyte EPROM,一個用來掃描EPROM的16 位計數器和一個DAC 組成。過零檢測器由臨界值檢測器組成。檢測器的臨界值是接收到的信號峰值的一部分,使檢測器可以根據參考零電位比較接收到的信號。這就使得在信號區的信號能最大范圍地被檢測到,從而使噪聲干擾最小。
存儲在EPROM 中的激勵信號必須設計成可以接收那些低到足以防止第一個臨界值接收器干擾不同周期的回聲。這些特殊的信號由一個約束最優化程序處理,這種程序主要是為了使回波的能量最小從而把回波的峰值限定位一個固定值。最合適的允許接收由固定振幅的最低回波Y(f)的驅動信號X(f)可以由解下列方程得到:

最優的結果主要取決于被選回聲的振幅,回聲越低,振幅越低,那么被一個有關的噪聲振幅干擾的可能性也越低。在任何條件下使用最好的信號取決于噪聲的實際量。傳感器還有一個簡單的噪聲測量系統。該系統可以通過在無回波階段監測輸入信號來估計實際噪聲。這個噪聲測量系統的輸出可以在低、中、高噪聲條件下轉換。
另外,回波的振幅主要取決于地面的反射性和距離。這些影響可以由接收電路中的一個自動增益控制放大器來使其最小化。因此回聲振幅可以保持在一個固定值。這就用到了第一個檢測器中的固定臨界值。越零檢測器的輸出可以用來驅動一個緩沖器(可以在回聲到達的時間內鎖存計數器輸出)。如果一個新的回波未被檢測到,則緩沖器的輸出不被更新。這就避免了無意義的測量。被緩沖的值是根據傳播時間和一個已知的固定值Na(該值由它在EPROM 中的存儲方式及第一個檢測器的臨界值水平決定)來定。系統時鐘為8MHz,因此周期為125ns,當一個距離超過1m,最大的測量時間約8ms。一個 50Hz 的多諧波振蕩器每20ms 提供計數器一個讀數。
溫度傳感器與誤差的自動補償
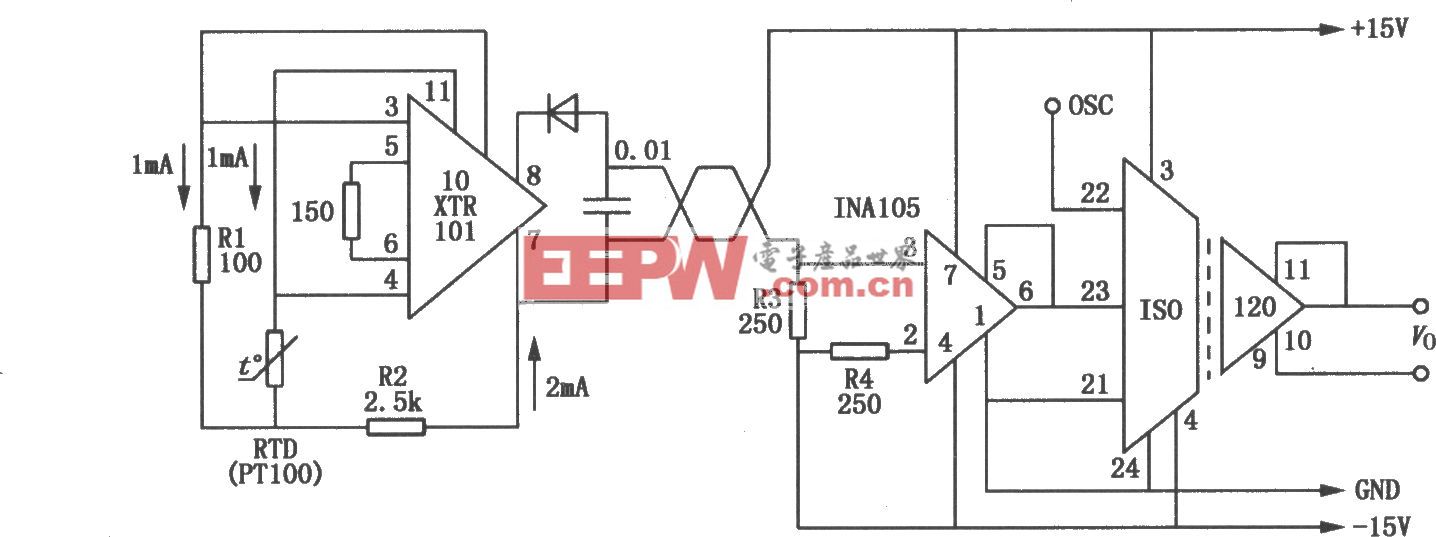
空氣溫度由一個溫度傳感器檢測并經電路處理得出。它裝在探頭中,誤差不超過1℃。誤差的自動補償可以由圖2 所示的簡單模擬電路得出。V 與所測距離成正比。
軟件設計思想
由于超聲發射傳感器與超聲接收傳感器相隔很近,當發射超聲波時,接收傳感器會收到很強的干擾信號。為防止系統的誤測,在軟件上采用延遲接收技術,以此提高系統的抗干擾能力。當起始鍵按下,即發送發射超聲波的指令,控制系統開始執行程序,完成對溫度的采集;發送、接收超聲波的時間間隔的測量;最后通過數值處理程序計算出被測距離,送顯示器顯示。本系統軟件采用模塊化設計,由主程序、測距子程序、測溫子程序、顯示子程序等主要模塊組成。主程序框圖如圖4所示。
測試結果
本系統應用于非接觸式測距。對相距0.1m~0.3m的兩物體、環境溫度從0℃ ~40℃之間變化時,進行了實際測試,由于系統增加了溫度修正系統及軟件補償技術,大大提高系統的測量準確度。實際測試證明,經修正后該系統的測量準確度可達到±0.01m。
結束語
本文提出的基于單片機的超聲波測距系統,具有成本低、精度高、誤差小、顯示直觀、電路簡單以及抗干擾性好等優點,能夠滿足一些中小規模系統的測量要求。尤其能夠應用于一些特殊的場合,如自助式停車,智能懸架和車前燈調節等。
紅外熱像儀相關文章:紅外熱像儀原理










評論