基于模糊PID參數自整定的溫度控制系統的研究

2.2 溫度控制系統的模型特性
鍋爐水溫控制系統可近似用一階慣性純滯后環節來表示,其傳遞函數為:
式中:K為對象的靜態增益;T為對象的時間參數;τ為對象的純滯后時間參數。本系統選用的是溫度作為控制對象,鍋爐的溫度控制系統是常見的確定性系統,針對以上的溫度控制系統得到鍋爐溫度控制系統的傳遞函數為:

從圖1可以看出,鍋爐中的水是不斷流動的,循環水對加熱絲加熱鍋爐中水的溫度是一個很強的干擾,增加了系統的復雜性,加大了控制難度,而一般常規的PID控制效果不太理想,所以對鍋爐水溫度控制系統采用模糊PID控制算法。
3 模糊PID控制算法
3.1 模糊PID參數自整定系統結構
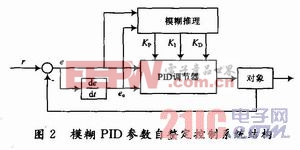
采用模糊PID參數自整定控制方式,首先要找出PID三個參數與控制偏差e和偏差的導數ec之間的模糊關系,在運行中通過不斷檢測e和ec,根據模糊控制原理來對三個參數進行修改,以滿足不同e和ec對控制參數的不同要求,從而使被控對象有良好的動靜態性能。即e,ec作為模糊控制器的輸入,PID三個參數作為輸出系統結構圖如圖2所示。本文引用地址:http://www.104case.com/article/162084.htm
3.2 PID參數的整定原則
按照系統時時變化的偏差e和偏差變化率ec,根據經驗,KP,KI,KD的整定原則如下:
(1)當偏差e較大時,誤差較大,為使系統有較快的響應速度,應取較大的KP;為了防止偏差變化率ec瞬時過大,應取較小的KD;為了避免較大的超調,應對積分作用加以限制,通常取KI=0。
(2)當偏差e處于中等大小時,為使系統相應具有較小的超調,KP應取得小些,KI取值要適當,這時KD取值對系統影響較大,取值應大小適中,以保證系統的響應速度。
(3)當偏差e較小時,為使系統具有較好的穩定性,KP與KI均應取大些,同時為避免系統在設定值附近出現振蕩,并考慮系統的抗干擾性能,應適當地選取KD值。KD值的選擇根據偏差變化率ec來確定,當ec較大時,KD取較小值,當ec值較小時,KD取較大值,一般情況下,KD為中等大小。
3.3 模糊PID控制器
設定輸入變量e和ec語言值的模糊子集為{NB,NM,NS,Z,PS,PM,PB),將偏差e和偏差變化率ec量化到(-3,3)的區域內。同樣,設定輸出量KP,KI和KD的模糊子集為{ZO,PS,PM,PB},并將其量化到區域(0,3)內。根據參數KP,KI和KD對系統輸出特性的影響情況,可得模糊控制規則為:










評論