基于STM32F105微控制器的雙CAN冗余設計方案

控制器局域網( Contro llerA reaN etwo rk, CAN)是一種多主方式的串行通訊總線。CAN 總線具有較高的位速率, 很強的抗電磁干擾性, 完善的錯誤檢測機制, 在汽車、制造業以及航空工業領域中得到廣泛應用 。由于船舶機艙環境極為惡劣, 且船舶航行過程中維修條件不如陸上, 對CAN 通信的可靠性要求很高, 采取雙CAN 冗余總線提高通信可靠性。本文提出一種基于STM32F105微控制器的雙CAN 冗余設計方案。
本文引用地址:http://www.104case.com/article/161991.htm1 硬件平臺組成
STM32F105是STM icroe lectron ics公司推出的一款基于ARM Co rtex- M3內核的32位微控制器, 其內核是專門設計于滿足高性能、低功耗、實時應用的嵌入式領域的要求。由于采用Thumb - 2指令集,與ARM7微控制器相比STM32運行速度最多可快35% 且代碼最多節省45% 。較高的主頻和代碼執行效率使系統在進行CAN 總線數據收發的同時仍可運行總線冗余算法。STM32F105微控制器內部集成2路獨立的CAN 控制器, 控制器集成在芯片內部, 避免了總線外擴引入的干擾, 同時簡化了電路設計、降低成本。
系統使用兩條完全獨立的CAN 總線, 兩個CAN 總線收發器和總線控制器, 實現物理層、數據鏈路層的全面冗余。在初始化時兩個控制器被同時激活, 一個作為主CAN, 另一個作為從CAN, 為主控制器的備份。正常運作時, 數據通過主CAN 優先發送; 當主CAN 總線繁忙時, 從CAN 總線分擔部分通信流量; 而當主CAN 總線發生故障時, 數據轉移至從CAN 控制器傳輸, 反之亦然。在任一總線發生故障時,數據都能經由另一條總線傳輸, 而當兩條總線都正常時, 使用兩總線同時傳輸, 增加約1倍的通信帶寬,這樣在保證了通信可靠性的同時提高了實時性。
CAN 總線接口電路設計如圖1所示, 使用T JA1050作為總線收發器, 它完成CAN 控制器與物理總線之間的電平轉換和差動收發。盡管TJA1050本身具備一定的保護能力, 但其與總線接口部分還是采用一定的安全和抗干擾措施; T JA1050的CANH 和CANL與地之間并聯兩只10pF的小電容, 可以濾除總線上的高頻干擾; 另外, 為了增強CAN 總線節點的抗干擾能力, 總線輸入端與地之間分別接入一只瞬態抑制二極管, 當兩輸入與地之間出現瞬變干擾時, 收發器輸入端電壓被鉗位在安全范圍。
為防止總線過壓造成節點損壞, STM32F105內置CAN 控制器的數據收發引腳并不與TJA1050直接相連, 通過ADuM1201磁隔離器實現信號隔離傳輸。與傳統光耦隔離相比, 磁隔離簡化了隔離電路設計, 并且磁隔離芯片的功耗很低, 大約相當于光耦隔離的1 /10。除了將CAN 數據信號隔離外,TJA1050T使用的電源和地也必須與系統完全隔離, 使用5V 隔離輸出的開關電源模塊IB0505LS提供隔離電源。由于CAN 總線數據傳輸率較高, 為了提高信號質量, 網絡拓撲結構應盡量設計成單線結構以避免信號反射, 同時終端連接120歐姆左右的匹配電阻。
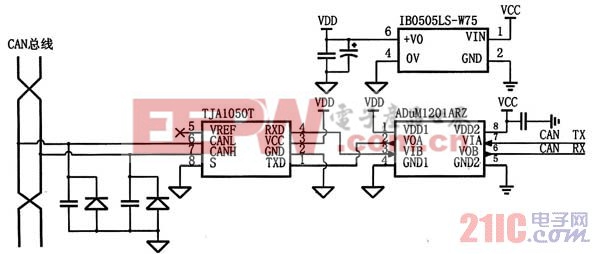
圖1 CAN 接口電路設計

pid控制器相關文章:pid控制器原理










評論