基于PID的單相逆變器復合控制方案設計

圖2中G為PID控制系統開環傳遞函數,由其頻率特性曲線可以看到,系統低頻開環增益非常大;截止頻率附近頻段相角裕度增大;高頻段開環增益很小,抑制了高頻干擾信號。通過滯后一超前相校正方法對PID控制器進行設計,達到了預期的目的。經過以上分析,PID傳遞函數為:

取采樣頻率和開關頻率相等,采用零階保持器將式(4)離散化可得對象的脈沖傳遞函數:

3 重復控制器設計
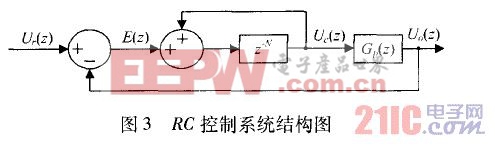
根據內模原理,在閉環系統中加入外部周期信號動態模型,則系統可以達到對外部周期信號漸近跟蹤的目的,重復控制策略正是基于這一原理。圖3為基本重復控制器系統結構圖,其中重復控制器離散表達式為:
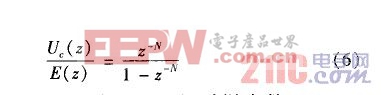
式中,Ⅳ為每基波周期對輸出電壓的采樣次數。
由式(6)可知,當頻率為∞=2~k/T(K=0,1,2,……, T為基波周期),由于z=1,所以若在閉環系統中嵌入重復控制器,將使開環增益趨向無窮大。在這種情況下,非諧波輸入信號將被強烈衰減,達到精確跟蹤輸入信號的目的。但是,由于無法精確知道控制對象動態特性,所以開環增益趨向無窮大將惡化閉環系統的穩定性。為了保證系統穩定性,需對基本重復控制系統改進。
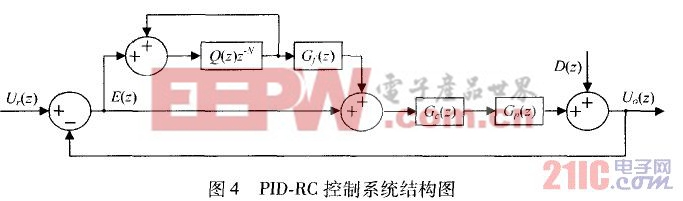
本方案提出的復合重復控制系統結構圖如圖4所示。







評論