基于DSP閉環控制的單相逆變器的研究

數據表計算公式如下:
其中tk為第k個方波脈沖的寬度,M2為調制比,ω為工頻角頻率,Tk為第K時刻的時間值(K=0~199)。
根據DSP的工作時鐘20MHz,則算得定時器的周期寄存器的值為500。根據以下定標公式計算數據表的值直接存入FLASH:
Datak就是在[Tk,Tk+1]區間驅動信號的相對觸發時刻值。
高頻逆變驅動電路采取移相控制方式。K1、K2組成超前臂,K3、K4組成滯后臂,分別超前Tm。開關管導通的時間分別為TK1、TK2、TK3、TK4。
工頻變換器電路也采取移相控制方式。Q5、Q6組成超前臂,Q7、Q8組成滯后臂,分別超前Tn。開關管導通的時間分別為TK5、TK6、TK7、TK8。
由于tk經PID調節器反饋控制的參數,所以引起TK(K=1,2,3,4,5,5,6,7,8)也隨之變化,實現實時閉環控制。
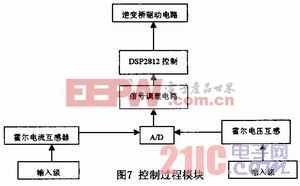
采樣電壓和電流通過接口電路,經轉換,輸入DSP的A/D,并用DSP實現數字PID調節器,使逆變器根據負載的變化,實時根據誤差信號計算出相應的控制量△k,經對DSP編程,根據△k的大小,查找對應不同的調制比的SPWM數據表,從而達到閉環控制的目的。把給定的電壓與,電流大小與反饋的電壓和電流大小比較,調節輸出SPWM脈沖寬度從而控制驅動電路,注意:一定要使能DSP內EV擴展控制寄存器中的REVSOCE位,采用周期中斷啟動ADC,系統進入閉環控制。
數字PID調節器算法如下:
ek為第K步誤差值,uk為第K步控制量,u0為初始控制量,Ik為積分項,三個系數kp、kl、kD由參數整定得到。
同時通過傳感器檢測過熱、過流等信號,經信號調理電路變成相應的方波信號,被DSP的事件管理器捕獲單元捕獲,檢測到的PDPINTx電平的變化產生INT1中斷,在200ns內終止所有的驅動信號。其具體控制過程如圖7所示。本文引用地址:http://www.104case.com/article/161960.htm
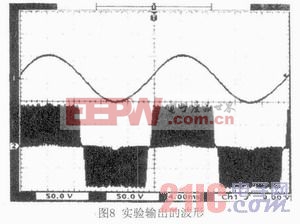
4 實驗結果
通過不斷的實驗,最終得到了滿意的結果,圖8示出了實驗輸出波形的結果,通過周波變換反相和濾波電路后得到相應的正弦波形。輸出電223V與標準電壓220V相比,其偏差為+1.3%5%;1輸出波形頻率為50.08Hz,其偏差為0.2Hz,達到標準頻率要求。經濾波后THD為1.8%。
5 總結
通過利用TMS320F2812的事件管理器來實施單相逆變器的閉環控制,動態性能極大提高,同時DSP算法參數的整定關系到整個系統的正常工作,是有效實現過壓、過流等保護的前提條件。還有,選擇好傳感器是實現過壓、過流保護的關健。











評論