基于模糊控制的模溫機控制器的設計與實現

本文取ΔT=2(℃)、T1=3(s)、T2=5(s),T3=8(s),所得的speed越小則表示升溫速率越快,反之則越慢。由此,系統就能自始至終跟蹤受控對象的變化趨勢,而不再局限于某類受控對象的動態特性,且具有較強的實時性。基于上述分層控制模型,系統借助升溫速率因子在較大偏差范圍內對受控對象實施全程控制,具體流程如圖3所示。本文引用地址:http://www.104case.com/article/161922.htm
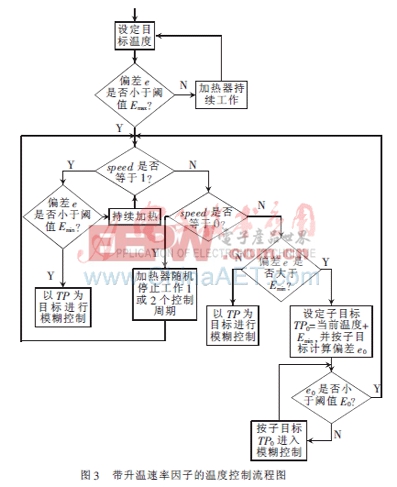
設定目標溫度TP后,系統實時計算升溫速率因子的模糊隸屬度,跟蹤升溫趨勢。當溫度偏差e進入一個較大閾值Emax(如60℃)范圍內后,系統根據speed選擇控制策略。
(1)當speed=1時,則認為升溫速率正常或偏慢,加熱器可持續工作。
(2)當speed=0時,則認為升溫速率過快,可使加熱器隨機停止工作1或2個控制周期以緩沖升溫速率。
(3)當speed=0.5時,則認為升溫速率較快,若當前溫度偏差e并未落入模糊控制論域Emin中,則可通過令TP0=當前溫度+Emin,系統以TP0為子目標進行模糊控制,并按子目標計算偏差e0。通過比較e0與閾值E0,當溫度上升至靠近子目標TP0時,則根據speed重新選擇宏觀控制策略。
(4)一旦偏差e落入模糊控制論域Emin中,則以TP為目標進入最后的模糊控制階段。
按照上述控制規則,系統結合升溫速率因子選擇控制策略,從較大的偏差開始,在整個控制過程中將伴隨若干以TP0為子目標的階段性模糊控制過程,從而合理協調了升溫速率,盡管可能會犧牲一些溫度上升的響應時間,但由于有效抑制了超調,相應地也減少了由于超調而花費的回調時間。從總體上看,系統性能得到一定程度的優化。
3 實驗結果分析
在室溫(20℃)下分別選用功率為500 W和1000 W的熔錫爐仿真模溫機加熱器對700 g錫進行加熱控溫實驗。實驗中分別采用了不帶升溫速率因子的普通模糊控制算法和帶升溫速率因子的分層模糊控制算法進行對比,具體數據如表1及表2所示。
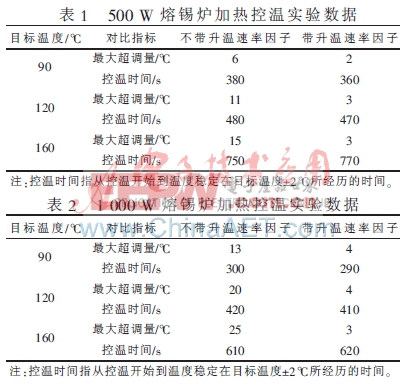
通過比較兩種不同功率熔錫爐的實驗數據可知,采用普通模糊控制方法進行控溫,超調量將隨著熔錫爐功率變大而顯著變大,而帶升溫速率因子的分層模糊控制方法的超調量則幾乎沒有變化,且所需的控溫時間也并不比普通模糊控制方法長。實驗結果表明,帶升溫速率因子的分層模糊控制方法能有效抑制超調,且對控溫環境的變化有良好的適應能力。
本文針對模溫機應用場合控溫環境時有變化的情況,討論了普通權系數自調整的解析式模糊控制方法的局限性,指出系統控制的滯后性是引發超調的重要原因。為能更準確地描述受控對象的變化趨勢,本文引入了實時性較強的升溫速率因子,并結合該因子在較大偏差范圍內合理選擇控制策略,使進入最后模糊控制階段前相當長的時段不再成為控溫“盲區”,能針對不同受控對象的動態變化特性協調整個控溫過程。當受控對象升溫速率過快時,系統通過在控溫過程中插入若干控制子過程加以宏觀調控。當受控對象升溫速率正常時,系統控溫過程則趨于普通的模糊控制。實驗數據表明,本文提出的模糊控制方法有效抑制了超調現象,對控溫環境的變化有良好的適應性。
參考文獻
[1] 蔡自興,徐光佑.人工智能及其應用[M].北京:清華大學出版社,2004.
[2] 龍升照,汪培莊.Fuzzy模糊控制的自調整問題[J].模糊數學,1982(8):105-112.
[3] 王偉,張航.公式法模糊決策的模糊控制器及其應用研究[J].計算機工程與應用,2007,43(27):246-248.

pid控制器相關文章:pid控制器原理










評論