基于鎖相環的可變量程轉速控制系統

本文介紹的基于鎖相環的可變量程轉速控制系統,是為研制新一代具有卷繞特性的調速電機控制器而開發的[1],其轉速信號檢測方法具有結構簡單、安裝方便、價廉可靠的特點。
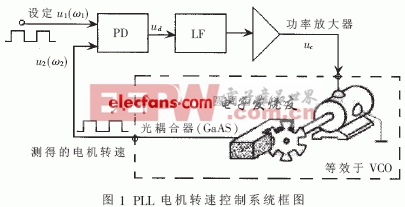
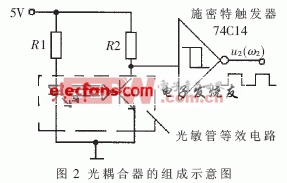
本文引用地址:http://www.104case.com/article/161896.htm用鎖相環路構成的電機轉速控制系統的框圖如圖1所示,其中,VCO已由電機和光轉速表取代。激勵電壓調節電機的轉速,在電機的軸上安裝一個開槽的扇形平盤。扇形盤轉動時不斷地切斷發光二極管發出的光線,使光耦合器中的光敏管產生頻率與電機轉速成整數倍的方波脈沖序列u2(ω2)。這樣,方波脈沖的頻率與激勵電壓有一定的函數關系,等效為鎖相環中的壓控振蕩器。為了使光電耦合器能輸出波形良好的方波,在光敏管之后通常還要接一個施密特觸發器,用于對信號整形,如圖2所示。
2 PLL電機轉速控制系統模型設計
由于電機具有較大的慣性,等效于一個時間常數很大的相位滯后網絡,可能會對環路穩定性有較大的影響。
環路中采用CMOS鑒頻鑒相器。光電耦合器產生的方波信號的頻率與電機轉速成正比,它與輸入參考信號u1(ω1)的頻率進行鑒頻與鑒相。當鎖相環路鎖定之后,電機的轉速可穩定在設定值上,沒有跟蹤頻率誤差,只有相位誤差。所選用的鑒頻鑒相器應保證環路具有足夠的捕獲范圍,在各種不同的起始條件下,環路都能鎖定。
下面重點介紹對電機和光轉速表組合的傳遞函數的推導。
以上分析表明,由于電機和光轉速表本身就是一個二階系統,在考慮了環路濾波器的作用之后,整個控制環路就是一個三階系統。由此得到的系統模型如圖3所示。圖3中設伺服放大器為增益等于Ka的零階系統。
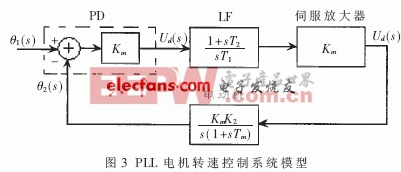
為了保證全系統穩定,環路濾波器必須具有零點(即相位超前校正功能)。可采用有源比例積分濾波器,否則在較高的頻率上,閉環傳遞函數的相位可能會超過180°,導致系統不穩定。
在設計電機轉速控制系統時,事先給定某些參數,如電機參數Km、Tm、扇形盤齒數K2等。其余的參數如伺服放大器增益Kα、環路濾波器參數τ1、τ2等,則需根據系統最佳動態性能以及穩定性能來選定。














評論