基于無線傳感器網絡的智能大棚控制系統

摘要:給出了一種基于嵌入式系統和無線傳感器網絡的智能大棚控制系統的設計方法,該方法通過傳感器對系統內的各種環境參數進行采集,并由無線通信網絡將數據傳回控制終端。控制終端由Qt編寫,能完成圖形界面繪制、數據處理、數據庫管理和PID控制計算,以及整個智能大棚系統的運行。運行結果表明,該系統人機界面良好、操作簡便、自動化程度高,具有良好的應用前景和推廣價值。
關鍵詞:智能大棚;無線傳感器網絡;無線數據采集;ARM
0 引言
智能大棚是基于嵌入式系統和無線傳感器網絡的自動控制系統,整個系統由無線監控節點、傳感器、變頻器和全GUI的人機控制終端等組成。各種傳感器、語音呼叫和控制狀態數據由安置在各個大棚里的監控節點來采集,再通過無線局域網傳輸到控制中心,計算機根據預先設定的數據,通過數據比較結合PID算法來精確控制各個控制終端。用戶可以隨時調整這些自動控制,以便讓大棚始終處于一個最佳生長環境。
1 系統設計方案
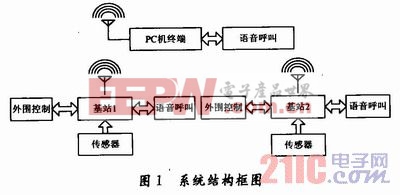
系統設計主要分為兩個部分,即終端虛擬控制平臺系統和大棚基站系統的設計,與傳統的儀器相比,基于計算機的虛擬儀器的優勢就是它可以方便地進行組網通信,實現連棟大棚的規模化管理,提高系統的靈活性。首先,系統通過大棚基站內的無線傳感器節點對棚內的各個環境參數進行采集(如溫度、濕度、光強、CO2濃度等),然后經過數據處理,再發送給終端虛擬控制中心,終端再通過數據比較和自適應PID控制算法發出控制指令,大棚基站接到控制指令后,對棚內的外圍電氣設備進行相應的控制,從而改變棚內的環境參數。如果在設定的時間內沒有接到終端的控制指令,大棚基站則會通過與內部設定的環境參數的比較,對相應的電氣設備進行控制操作,這種方法的好處是可以避免在終端維修或網絡繁忙時出現數據遺失所造成的大棚基站失控。此外,終端和基站、基站和基站之間還可以進行語音呼叫,使終端用戶可以隨時和各棚內的工作人員進行聯系,了解大棚基站的運作狀況。其系統結構框圖如圖1所示。
2 系統硬件設計
系統監控主要由大棚基站和PC終端機兩部分組成,PC機終端是整個系統的數據管理和控制決策中心,根據棚內的具體參數,由終端系統專家發出最合理的參數設置和控制指令。大棚基站通過無線傳感器網絡節點進行數據采集,并與PC機終端所設定的參數進行比較,從而對外圍電氣設備進行控制,以改變棚內的環境,使棚內達到一個最佳的生長環境,并把棚內的環境參數、電氣設備的狀態反饋給PC機終端。













評論