CMAC網絡在機器人手眼系統位置控制中的應用

表1 激活單元地址分布
| si | a1 | a2 | a3 | a4 | a5 | a6 | a7 | a8 | a9 | a10 |
| 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| 3 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 |
| 4 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 |
| 5 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 0 |
| 6 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
經歸納,輸入變量Si激活存儲單元的首地址mi的計算方法如下:
mi=Si(C-Δ)+1 (4)
其中,Si為輸入量的量化值;C為泛化參數;△為相鄰輸入激活存儲單元的重疊單元數大小。若輸入矢量有q個量化級,則存儲區A需要q(C-△)+C個存儲單元。.
當輸入空間的維數n>1時;設輸入空間為n維矢量Si=(Si1,Si2,…,Sin),對于每個分量Sij,都可以看作圖1所示結構模型的一維輸入量。由式(3)可得其對應的輸出為:
其中,mj為Sij所激活存儲單元的首地址。整個CMAC網絡可看作由n個如圖1所示的子網絡組成,S對應的輸出yi可看作n個子網絡輸出yij(j=1,2,…,n)的疊加。
若每個輸入分量有q個量化級,每個子網絡中兩相鄰樣本有△個單元重疊,采用上述疊加方法共需存儲單元n×[q(C-△)+C]。而對于傳統的多維概念映射算法來說,n維輸入空間中可能的輸入狀態為qn個。對于一些實際系統,qn往往遠遠大于n×[q(C-△)+C]。例如8維輸入,量化級為200個等級,泛化參數C取為40,相鄰輸入激活存儲單元的重疊單元數大小△為35,則用疊加處理法需要11200個存儲單元,而用傳統的概念映射算法需要2008個存儲單元。對于傳統的概念映射算法所帶來的要求存儲空間過大的問題,最常用的方法是把A當作一個虛擬存儲區,通過散射編碼映射到一個小得多的物理空間單元Ap中,從而減少存儲空間。但是這種地址壓縮技術隨機性很強,會帶來沖撞問題且不可避免。然而,對多維CMAC網絡采用疊加處理法,不但可以大大減少占用的存儲單元數,而且還可以避免地址壓縮帶來的沖撞現象,大大提高網絡的映射精度和學習速度。
圖2
2 實驗及仿真結果
實驗是在山東大學現代物流實驗中心進行的。該機器人手眼系統由用于抓取物體的SK6機械手和用于視覺定位的Panasonic WV-CP410/G彩色攝像頭組成。攝像頭采集的圖像是二維的,而機械手運動到某一位置需要六自由度坐標。因此必須把二維圖像坐標轉換成機器人運動空間的六維坐標,才能控制機器人運動到指定的空間位置,這就是機器人手眼系統位置控制問題。本文采用CMAC神經網絡實現了這一坐標變換,并對其結果與BP網絡進行了比較。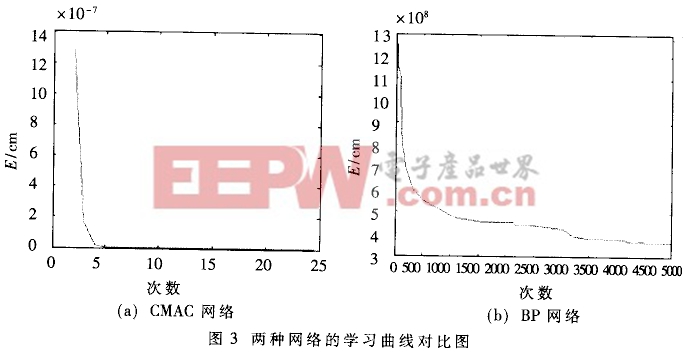
本實驗共采集到793個輸入樣本,選取CMAC網絡的量化精度Q為1000,泛化參數C為80,學習步長η為0.30。圖2(a)和(b)分別為對CMAC網絡訓練25次和對BP網絡訓練5000次的誤差平方和曲面圖。可以看出,CMAC網絡在訓練次數少于BP網絡的情況下,其誤差平方和遠遠小于BP網絡,且誤差分布比較均勻。圖3(a)和(b)分別為CMAC網絡和BP網絡的誤差平方和隨學習次數的增加而變化的曲線圖。由圖可知CMAC網絡的學習速度較BP網絡有較大提高。






評論