基于DSP的無刷直流電機智能控制系統研究

3.5 控制程序設計
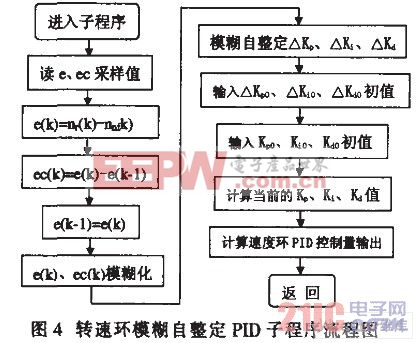
在TMS320LF2407 DSP控制器上,采用C語言和模塊化設計方法,設計出速度控制器和電流控制器的應用程序,包括主程序、模糊自整定PID子程序、PID程序、中斷子程序等,完成初始化、參數給定、數據采集、運算與轉換、控制算法、控制量輸出、PWM與ADC中斷、邏輯換相、故障檢測等,實現了對直流無刷電機的實時控制。模糊自整定PID子程序如圖4所示。
4 通訊與監控系統設計
采用現場總線Modbus和上位監控技術,設計了通訊與監控系統的硬件電路和軟件程序。用C語言和中斷程序法設計了下位機通訊程序,包括端口初始化、確定通訊波特率、校驗位、奇偶位、地址等。用VB語言的通訊控件MSComm對通訊端口進行初始化和通訊格式確定,并應用面向對象的程序方法設計了上位監控系統,包括系統命令、趨勢組態、功能組態、狀態檢測等,如按下系統命令中的“參數設置”功能按鈕,可進行速度給定nr,Kp0、Ki0、Kd0初值等值的設定;按下“顯示設置”可觀察Kp、Ki、Kd、n等實時參數。實現了上、下位機通過現場總線Modbus進行信息交換,人-機界面友好,操作方便靈活。
5 系統調試結果
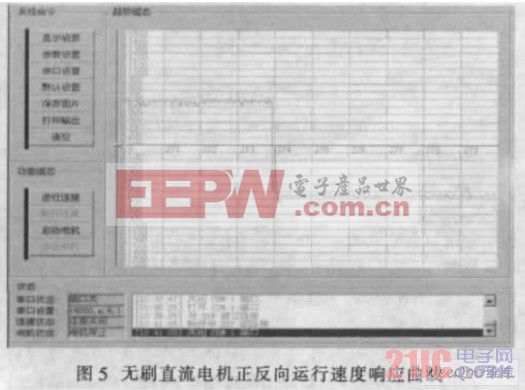
系統速度環給定為650轉/分,啟動并運行系統,由上位機監控的可視化運行曲線可知,速度響應快,無超調,調節時間短,能快速實現正、反向運行,獲得了較好的的起動性能與運行性能,滿足了無刷直流電機系統對速度調節的平穩性和快速性的要求,轉速特性如圖5所示。
6 結束語
本文的創新點是融合了“現場總線,智能控制,數字檢測,上位監控”等多種先進技術,充分利用了DSP速度快、運算能力強、資源豐富的優勢;發揮了模糊自整定PID和PID控制算法的優勢,使系統具有較快的響應速度和抗參數變化的魯棒性;設計的通訊與上位監控系統,實現了系統的實時監控與遠程控制,方便靈活,實際調試結果證明了該設計的有效性。我所研制的DSP實踐開發系統已在高校和企業培訓中心得到了應用,并具有較好的推廣前景











評論