基于Julius的機器人語音識別系統構建

2 系統框架
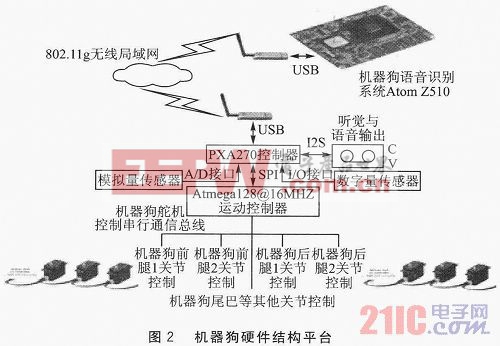
2.1 硬件結構
在語音識別的機器狗控制系統中Atom Z510為訓練學習機大腦(1.1 GHz主頻的Intel Atom Z510嵌入式控制平臺),它主要完成語音識別的功能。PXA270控制器(Intel公司于2003年底推出的性能強勁的PXA27x系列嵌入式處理器,基于ARMv5E的XScale內核,最高頻率可達624MHz)作為機器狗本體上的核心智能控制器,接收Atom Z510識別后的結果,發出控制命令。ATmega128控制器(Atmel公司的8位系列單片機中的一種,運行頻率16 MHz)完成基于串行總線的數字舵機控制,完成對機器狗的前后腿以及尾巴等關節控制。機器狗硬件結構平臺如圖2所示。本文引用地址:http://www.104case.com/article/161552.htm
2.2 軟件結構
整個機器人系統包括3個模塊:Julius語音識別模塊、GUI人機界面、機器人控制模塊。Julius將識別的語音命令提交給GUI模塊,并在GUI上顯示;同時GUI將語音命令轉化為動作控制命令并發給機器人控制模塊;GUI還可以控制Julius的啟動和停止。其中機器人控制模塊主要在PXA270上,而語音識別和GUI是在Atom Z510上。系統軟件模型如圖3所示。

3 語音識別系統構建
一個完整的語音識別系統一般包括3部分:聲學模型、語言模型和識別器。在本系統中只建立基于控制命令(動詞)的識別語法,其他詞忽略,因此沒有構建語言模型;識別器采用Julius開源平臺,此部分只用配置參數和相關文件。本文主要工作是聲學模型訓練和語音識別系統構建。
3.1 聲學模型訓練
聲學模型是識別系統的底層模型,是語音識別系統中最關鍵的一部分,它是每個聲學單元的聲學模型參數集合。本系統的聲學模型是使用HTK對采集的語音庫進行多次迭代訓練后提取的,基于詞的聲學特征向量集。HTK(HMM Tools Kit)是由英國劍橋大學工程系的語音視覺和機器人技術工作組(Speech Vision and Robotics Group)開發,專門用于建立和處理HMM的實驗工具包,主要應用于語音識別領域,也可用于語音模型的測試和分析。其具體訓練步驟如下:
(1)數據準備
收集漢語標準普通話的語料庫,并將語料庫中的語音標記,創建語音識別單元元素列表文件。
(2)特征提取
本系統采用MFCC進行語音的特征參數提取,訓練中將每一個語音文件用工具HCopy轉換成MFCC格式。
(3)HMM定義
在訓練HMM模型時要給出模型的初始框架,本系統中的HMM模型選擇同一個結構,如圖4所示。該模型包含4個活動狀態{S2,S3,S4,S5),開始和結束(這里是S1.S6),是非發散狀態。觀察函數bi是帶對角矩陣的高斯分布,狀態的可能轉換由aij表示。










評論