EPM7128在光柵位移測量儀中的應用

光柵尺信號的細分與辨向足提高光柵尺測量精度的關鍵性一步,沒計者需要綜合考慮辨向與細分的復雜性。在辨向時,是對細分后的信號進行辨向,而不是在細分前進行辨向,否則不能提高測量精度。本測量系統中是先細分、后辨向。電路仿真波形如圖5所示。
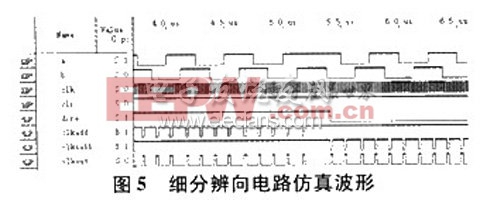
在波形圖中:a、b信號足輸入波形,clk是系統時鐘;clr是系統復位信號;direction是方向信號,通過該信號能夠判斷出光柵尺中指示光柵的移動方向,如果是高電平,則表示指示光柵作正向運動,反之則作反向運動;clkadd表示指示光柵正向運動時的細分信號;clksubb表示指示光柵反向運動時的細分信號;clkout信號是clkadd和clksubb相與非后的結果,該信號作為可逆計數器的時鐘信號;當direction為高電平時,叮逆計數器作加運算,當direction為低電平時,可逆計數器作減運算。
3.3 計數電路
本系統中的計數器采用VHDL進行設計,輸入信號定義為時鐘信號和方向信號,輸出信號定義為24位的計數結果。用VHDL實現的24位可逆計數器功能的原程序如下:

仿真波形如圖6所示。
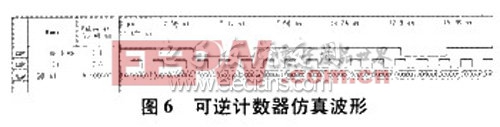
在波形圖中:clk信號是上一級電路的clkout信號,作為可逆計數器的時鐘;up_down是辨向信號,計數器的加運算和減運算由該信號控制,當up_down為高電平時計數器作加法,否則作減法。
3.4 譯碼驅動和顯示電路
本系統中要正確顯示測量結果,需要譯碼驅動和顯示電路模塊,澤碼電路用于轉換24位的計數結果;顯示電路需要8個LED顯示數據,其中1個LED為符號位。當正向運動時,符號位不顯示符號,當反向運動時顯示-號。
4 結束語
基于EPM 7128SLC84-15構成的位移測量系統具有分辨率高、誤差小、電路結構簡單、成本低等優點,完全能夠滿足實際測量的需要。由于采用的是CPLD設計,系統易于升級。








評論