多網絡融合的水廠自動化控制系統設計

智能測控節點主控芯片采用Microchip公司生產的PIC32MX795F512L。它是一款基于M4K內核的32位RISC嵌入式處理器,內置128 KB的SRAM存儲器和512 KB的Flash閃存,集成度高,芯片內部的預取高速緩存模塊可加速閃存的執行速度。此外,芯片內置最多16通道10位ADC、2路CAN2.0控制器、6路UART標準串行口模塊,USB接口、工業以太網絡控制器等。由于PIC32MX795F512L芯片外設資源非常豐富,外圍硬件電路非常簡單,從而提高了智能測控節點的兼容性和穩定性。智能測控節點的硬件結構框圖如圖2所示。本文引用地址:http://www.104case.com/article/161403.htm
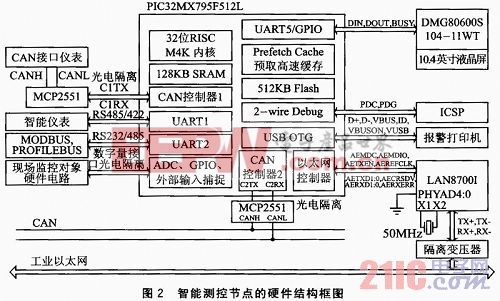
PIC32MX795F512L內置的以太網控制器與LAN8700I相連,TX+、TX-、RX+、RX-信號線經過隔離變壓器隔離后,再連接網元層的交換機。本設計采用基丁RMII(Reduced Media Independent Interface,簡化媒體獨立接口)的10/100Mbps;以太MAC與LAN8700I相連,其幀格式遵循IEEE802.3(10M)/IEEE802.3u(100M)協議,端口信號線少,連接簡單。
PIC32MX795F512L內置CAN控制器的輸出信號,須經過光電隔離后,再連接CAN控制器接口芯片。設計使用Microchip公司的MCP2551作為接口芯片,該芯片完全滿足ISO11898標準物理層規范要求,通信速率可達1 Mb/s,抗工業環境中的高壓瞬間干擾,其差分總線具有很強的抗噪特性,其欠壓保護功能使得未上電的節點或欠壓節點對總線無任何影響,具有很強的保護總線能力。設計中將芯片的CAN控制器2作為工業以太網絡的冗余,一旦智能測控節點的以太網絡接口發生故障則報警,同時CAN網絡自動投切,保證現場數據能實時上傳到中控室,并執行中控室發來的遠程控制命令。
智能測控節點有友好的人機界面接口,節點使用觸摸液晶屏(10.4英寸TFT,800×600圖形點陣)在現場顯示設備狀態。本設計通過節點的串口和迪文科技的DMG80600S104智能顯示終端連接。DMG80600S104基于圖形界面操作,通過設置/下載觸控配置文件后,可直接讀取觸摸鍵值。圖形顯示和觸摸感應的實時性強,方便人員完成各個節點功能參數的設定(包括節點地址、通信速率、操作優先級等)及設備控制。
PIC32MX795F512L支持符合USB 2.0規范的全速設備和OTG(On-The-Go)控制器,系統的智能測控節點連接一個USB接口的針式報警打印機,用于在設備現場實時記錄和輸出報警,方便高效。
系統的每個智能測控節點硬件結構都與圖2類似,只是不同節點有不同的現場監控對象。按照區域劃分,通常水廠的監控對象有取水泵站的取水頭水位、閥門狀態;加礬系統的濁度儀、流量計、礬池液位計的變量,計量泵電動沖程控制和攪拌系統控制;加氯系統的源水流量計、氯氣管隔膜壓力表的數值,余氯分析儀、漏氯報警儀的變量、真空調節器入口閥開關狀態、水射器和加氯機控制等;送水泵站的清水池水位、送水泵出口壓力值、閥門狀態、送水泵的各相電壓和電流、變頻器控制等。以上的智能儀表有些需要RS232和RS485等通信接口(譬如濁度儀等),而智能測控節點提供了多類型的接口和儀表連接,具有很強的兼容性和很高的可集成度。
3 系統軟件設計
3.1 工業以太網絡和CAN網絡的冗余策略
由于水廠廠區面積較大,容易發生現場智能測控節點與中控室的網絡鏈接故障,并且為滿足網絡建設和維護的低成本需求,設計采用網絡鏈路冗余的方法解決這個問題。設計中,工業以太網絡和CAN網絡分別鋪設,減小同時發生網絡鏈路故障的概率,同時使用PPT,衡量網絡質量以實現自動投切的冗余策略,以保證網絡的穩定性和安全性。
定義智能測控節點巡檢周期時間PPTnode(Node Polling Periodic Time)為節點通過工業以太網向上層發送現場采集的數據的間隔時間,一般取200~1000 ms,本文取200 ms,即
PPTnode=0.2s (1)
上位機巡檢周期時間PPThost(Host Polling Periodic Time)簡稱PPT,為上位機收到智能測控節點上傳現場數據的間隔時間。那么,使用上位機定時器從t=t0時刻開始可測量出一個無限長的樣本,即
PPThost=PPT=(PPT1,PPT2,…,PPTn,…)
0n+∞ (2)
引入上位機平滑巡檢周期時間PPTs(Smooth Polling Periodic Time)作為衡量工業以太網絡平臺的智能測控節點和上位機之間通信質量,表示為:
![]()
第一次測量到PPT樣本時,PPTs值取節點的巡檢周期時間為:PPTnode,以后每測量到一個新的PPT樣本,就按上式重新計算一次PPTs。
依照經驗,取α=0.25,若
PPTs>0.8 (4)
則認為通信鏈路斷開,自動投切到CAN網絡。








評論