步進電機細分控制

步進電動機是純粹的數字控制電動機,它將電脈沖信號轉變為角位移,即給一個脈沖,步進電機就轉一個角度,因此非常合適單片機控制,在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,電機則轉過一個步距角,同時步進電機只有周期性的無累積誤差,精度高。
步進電動機有如下特點:
1)步進電動機的角位移與輸入脈沖數嚴格成正比。因此,當它轉一圈后,沒有累計誤差,具有良好的跟隨性。
2)由步進電動機與驅動電路組成的開環數控系統,既簡單、廉價,又非常可靠,同時,它也可以與角度反饋環節組成高性能的閉環數控系統。
3)步進電動機的動態響應快,易于啟停、正反轉及變速。
4)速度可在相當寬的范圍內平穩調整,低速下仍能獲得較大轉距,因此一般可以不用減速器而直接驅動負載。
5)步進電機只能通過脈沖電源供電才能運行,不能直接使用交流電源和直流電源。
6)步進電機存在振蕩和失步現象,必須對控制系統和機械負載采取相應措施。
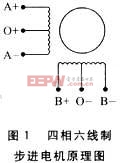
步進電機具有和機械結構簡單的優點,圖1是四相六線制步進電機原理圖,這類步進電機既可作為四相電機使用,也可以做為兩相電機使用,使用靈活,因此應用廣泛。
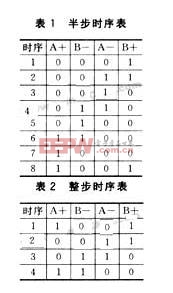
步進電機有兩種工作方式:整步方式和半步方式。以步進角1.8度四相混合式步進電機為例,在整步方式下,步進電機每接收一個脈沖,旋轉1.8度,旋轉一周,則需要200個脈沖,在半步方式下,步進電機每接收一個脈沖,旋轉0.9度,旋轉一周,則需要400個脈沖。控制步進電機旋轉必須按一定時序對步進電機引線輸入脈沖,以上述四相六線制步進電機為例,其半步工作方式和整步工作方式的控制時序如表1和表2所列。
步進電機在低頻工作時,會有振動大、噪聲大的缺點。如果使用細分方式,就能很好的解決這個問題,步進電機的細分控制,從本質上講是通過對步進電機勵磁繞組中電流的控制,使步進電機內部的合成磁場為均勻的圓形旋轉磁場,從而實現步進電機步距角的細分,一般情況下,合成磁場矢量的幅值決定了步進電機旋轉力矩的大小,相鄰兩合成磁場矢量之間的夾角大小決定了步距角的大小,步進電機半步工作方式就蘊涵了細分的工作原理。
實現細分方式有多種方法,最常用的是脈寬調制式斬波驅動方式,大多數專用的步進電機驅動芯片都采用這種驅動方式,TA8435就是其中一種芯片。







評論