虛擬儀器在電機控制器開發中的應用

摘要:為了監測無刷直流電機控制器的控制性能,在開發控制器過程中應用了虛擬儀器技術,設計采用LabVIEW編寫可與控制器交互的上位機軟件;通信部分采用成本低,易控制的標準串口總線來實現電機轉速、電壓、母線電流的PI參數的數據傳輸;設計的上位機PI參數調整方法優于傳統的逐次燒寫法,從而降低了硬件損耗與時間成本;上位機軟件系統采用開放式設計,使之不依賴于下位機型號與工作模式,具有較強的通用性。測試表明,設計的系統能完成實時監測以及控制器的控制參數設定等功能。
關鍵詞:虛擬儀器;直流電機;電機控制器;數據采集
虛擬儀器是基于通用計算機軟硬件的測試平臺,已經在工業控制測試領域有了廣泛的應用。LabVIEW是由美國國家儀器公司推出的虛擬儀器開發工具,應用圖形化編程方式,功能強大,界面友好,擁有豐富的計算函數,高級的采集和信號分析控件,完善的仿真調試工具,動態的連續跟蹤方式。目前國內已開展將虛擬儀器應用于電機測控方面的研究,但開發的系統檢測項目有限,如徐軍教授開發的基于NI數據采集卡的電機性能檢測系統,只能測量電機三相功率,負載特性等。而進行電機控制器開發測試時還經常要觀測電機的電壓、電流及轉速,它們是電機啟動及調速的關鍵參數;另外目前電機調速常用的雙閉環PI算法中Pl參數的調整往往是根據經驗及試驗的方式設定,過程相當繁瑣。所以開發一款軟件解決這些問題很有必要。本文中應用LabVIEW編寫上位機軟件,軟件分為數據檢測和PI參數設定兩個基本模塊。并應用控制芯片獨立的串口通信接口與上位機實現了數據的檢測及PI參數的設定。
1 系統結構
系統原理結構框圖見圖1。
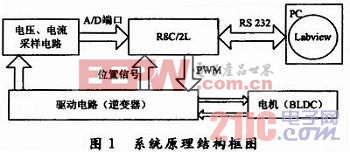
該設計中下位機可使用獨立于控制器的單片機或DSP,但為了能直接方便地設置電機控制PI參數,直接使用了控制器上的控制芯片。主控制芯片采用瑞薩電子一款電機控制專用16位單片機R5F212L4SNFP,它自帶6路PWM,9路10位的A/D轉換器,1.5 KB數據FLASH,兩個獨立的串行通信接口,并擁有串口通信的獨立定時器;在完成控制功能之余有足夠的端口完成與上位機的通信。LabVIEW使用通用接口總線(GPIB),標準串行總線(RS 232),VME儀器擴展(VXI)和其他硬件標準與外部儀器通信及控制外部儀器。考慮到硬件成本及方便性這里采用RS 232標準串口通信方式。系統能觀測的數據有電壓、電流、轉速等。電流由毫歐級采樣電阻采樣并適當上拉后接入A/D端(測量的是在每個方波的中點激發A/D轉換采集的值);電壓由精密電阻分壓后接入A/D端;電機轉速可由換相信號計算得出;電機轉速的設定是芯片外的一個線性電壓值經A/D轉換后計算給定;控制芯片通過電平轉換芯片TC232與上位機完成串行通信,本文主要介紹上位機程序的設計,控制硬件因篇幅不作介紹。
2 通信協議設計
該設計通信約定由上位機軟件發送,包含PI參數和數據讀取設定的指令;下位機(R8C/2L)接收數據后解析數據,若判斷系統工作于PI參數設定模式時,保存并更新PI參數,若工作于數據采集模式,則根據命令符選擇電流電壓A/D轉換通道或計算電機轉速及設定轉速,并發送到串口。
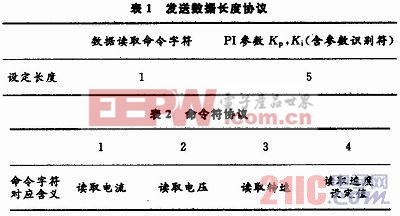
2.1 數據長度協議
數據長度定義和命令符協議分別見表1、表2。當系統工作于數據采集模式時,上位機依次發送字符1,2,3,4,并依次根據協議返回測量值。當系統工作于PI參數設定模式時,由上位機依次發送速度環,電流環的Kp,Ki值,并約定在數據之首添加參數識別符A,B,C,D;即速度環參數模式為A+Kp,B+Ki;電流環的參數模式為C+Kp,D+Ki。











評論