基于激光測距技術的車輛寬高檢測系統的設計

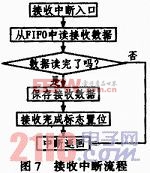
數據采集使用串口通訊模式,發送數據采用查詢方式完成,接收數據采用中斷方式完成,接收中斷流程如圖7所示。傳感器和主控制器之間通過事先約定的通訊協議進行數據收發,主控制器只需設置好相應的串口號、波特率及相應端口設量,發送測量命令,等待接收。單次讀數據命令為:RNLMDscandatata;連續讀數據命令為:EN LMDscandata1;連續停數據命令為:EN LMDscandata0。本文引用地址:http://www.104case.com/article/161163.htm
5 模擬實驗
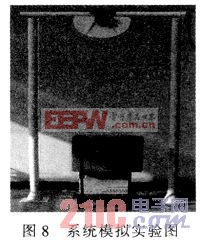
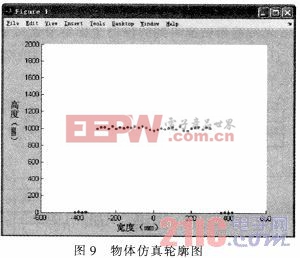
系統整體設計完成后,在進入超限點進行現場調試之前,在實驗室進行了模擬實驗。將激光傳感器固定在3 m高的支架上,讓一放置立方體被測物的小推車以10km/h的速度從激光傳感器下經過,如圖8所示。將激光傳感器設置在掃描角度為0°~180°,角度分辨率為0.5°的模式下,當小推車完全經過時,液晶屏上即可顯示立方體被測物的最大寬度和高度,同時可通過MATLAB仿真物體的輪廓,如圖9所示。同
等條件下,讓小推車在傳感器下先后通過數次后統計結果,將測量值和實際值比較可得誤差在0.15m以內的達到95%,符合測量精度要求。
6 結束語
針對高速公路車輛超限超載這一問題,設計了基于激光測距技術的寬高檢測系統,可實現對行進車輛進行實時動態測量。本系統在實驗期間,工作可靠穩定,功耗低,計算速度快,測量精度高,抗干擾能力強,實驗誤差符合高速公路管理部門對于行進車輛寬高超限檢測的要求。通過反復實驗驗證,該設計有效可行,為下一階段進入現場進行實地調試作了充分準備。





評論