基于激光測(cè)距技術(shù)的車輛寬高檢測(cè)系統(tǒng)的設(shè)計(jì)

3.1 主控制器模塊設(shè)計(jì)
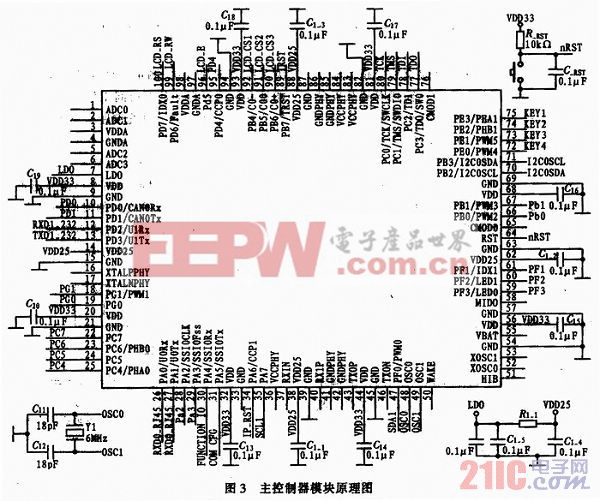
采用ARMCortex-M3內(nèi)核的微控制器LM3S8962作為系統(tǒng)控制核心。Cortex-M3內(nèi)核采用ARMv7-M架構(gòu),它緊湊地結(jié)合Thumb-2指令集,采用哈佛處理器架構(gòu),與ARM7TDMI相比,比Thumb指令每兆赫的效率提高了70%,比ARM指令提高35%。由于Thumb-2指令是Thumb指令的擴(kuò)展,16位和32位指令共存于同一模式下,復(fù)雜性大幅下降,代碼密度和性能均得到提高。LM3S8962時(shí)鐘頻率高達(dá)50 Hz,多達(dá)36個(gè)中斷源具有8個(gè)優(yōu)先等級(jí),提供系統(tǒng)時(shí)鐘,256 kB的FALSH,64 kB的SRAM,休眠模塊,通用異步收發(fā)器,通用定時(shí)器,PC接口以及其他豐富的外設(shè)接口,可方便的對(duì)各種現(xiàn)場(chǎng)設(shè)備進(jìn)行有效控制。圖3為L(zhǎng)M3S8962的外設(shè)接口及其外圍電路(時(shí)鐘、復(fù)位、UART接口等)。本文引用地址:http://www.104case.com/article/161163.htm
3. 2 數(shù)據(jù)通訊模塊設(shè)計(jì)
將激光傳感器掃描得到的極值坐標(biāo)信號(hào)通過通用異步收發(fā)器(UART)傳送給微控制器,選用了MAX232進(jìn)行RS232電平轉(zhuǎn)換,如圖4所示。
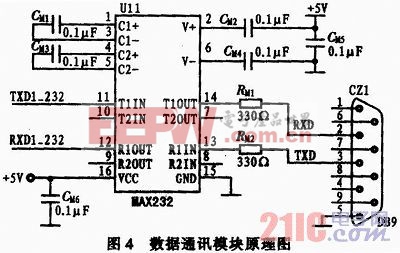
LM3S8962具有兩個(gè)串行接口UART0和UART1。本系統(tǒng)選用UART1用于RS232通信使用。UART是一種應(yīng)用廣泛的短距離串行傳輸接口,通信雙方只要采用相同的幀格式和波特率,僅用兩根信號(hào)線(Rx和Tx)就可以完成通信過程,有獨(dú)立的發(fā)送FIFO和接收FIFO。有可編程的波特率發(fā)生器,允許速率高達(dá)460.8 kb/s。系統(tǒng)中通過UART傳送的數(shù)據(jù)高速存儲(chǔ)于SRAM存儲(chǔ)器內(nèi)供微控制器進(jìn)行實(shí)時(shí)快速計(jì)算。





評(píng)論