一種多傳感器可信度的確定方法

該矩陣是對稱陣,即
(1)將判斷矩陣Dj的各列作歸一化處理,得到矩陣
(2)將列歸一化的判斷矩陣*****按行相加,得到過渡可信度向量
(3)將過渡可信度向量
對每一組重復此過程,分別建立各目標的判斷矩陣(q個),相應得到q個可信度向量Wj(j=1,2,…,q)。傳感器r(r=1,2,…,p)的綜合可信度為其對各個目標量測可信度的平均值
3 仿真實例及誤差分析
為驗證該傳感器可信度的有效性,運用java語言模擬5個傳感器對地面上卡車的運動情況的探測,利用文中算法融合數據與等可信度(每個傳感器賦予相同可信度)的融合結果進行比較,如圖1。本文引用地址:http://www.104case.com/article/161157.htm
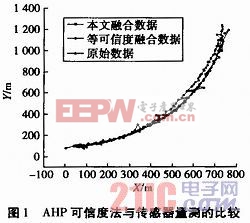
由圖1看出,本文AHP可信度確定法的融合結果更為接近目標真實數據,優于等可信度法的融合結果。
分別計算AHP可信度確定法的融合結果與真實數據間的均方誤差和平均距離,并與等可信度方法融合結果進行比較如表1:

由表1可以看出,本文融合數據與真實數據間的均方誤差和平均距離比等可信度融合結果小,驗證了改可信度確定方法的有效性。
4 結論
本文借鑒層次分析法的思想,通過信息的相對可信度建立了傳感器可信度矩陣,進而對所有傳感器按可信度進行排序,根據傳感器的可信度決定參與融合量測客觀性,通過對地面卡車的融合結果進行分析,驗證了該方法的有效性。












評論