基于CompactRIO的直流無刷電機控制系統

電路中D1和C2是自舉電路的關鍵器件。D1是快恢復二極管,其作用是當Q1關斷時為C2充電提供正向電流通道,當Q1開通時,VB端電壓會被抬高,而D1可以阻止電流流入VCC,達到保護電源的目的。C2是自舉電容,其容值的選取受電路的器件和電路工作頻率影響,其計算公式如式(1):
Qc為上橋MOS管的MOSFET的柵極電荷;IQBS為上橋驅動的靜態電流;ICCBS為自舉電容的漏電流;QLS為驅動IC中電平轉換電路的電荷要求;VLS為下橋器件壓降;VF為自舉二極管正向壓降。本文引用地址:http://www.104case.com/article/161137.htm
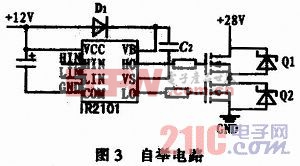
由公式可以得出,在使用自舉電路時應根據所選用的器件的參數以及電路的最低工作頻率來確定電容C的最小取值。實際應用中選取的電容值應為理論計算值的兩倍以上。
4 軟件部分
使用LabVIEW對CompactRIO進行圖形化編程。軟件設計部分主要包括電機測速模塊、控制量計算及脈寬調制模塊,時序產生模塊。
4.1 電機測速模塊
直流無刷電機轉速與霍爾信號的頻率以及線圈的極對子數的對應關系如下:n=f/p。其中n代表轉速,f代表霍爾信號的頻率,p代表電機的極對子數。通過測量某一路霍爾信號即可測得電機的轉速。
CompactRIO數字I/O獲取某一路霍爾信號,測量其相鄰兩個上升沿之間的時間就可以計算出霍爾信號的頻率,進而得到電機的轉速,或者通過計算在短時間內獲得的霍爾信號脈沖數量。
在需要獲得精確轉速的情況下,一般使用碼盤測速。碼盤在電機轉動一圈時可以產生幾千個脈沖,在如此大數量的采樣脈沖下,引起的誤差會減小很多。
4.2 控制量計算及脈寬調制模塊
電機的轉速控制通過脈寬調制來實現。CompactRIO根據轉速設定值和實際值之間的誤差來計算輸出相應的控制量,該控制量經過脈寬調制模塊后產生PWM波。PWM波在一個周期內,其高電平的占空比受控制量計算模塊輸出的控制量調節,控制量越大,高電平的比例越大。
控制量計算模塊的核心是PID控制算法。PID算法是工業領域中最常用的控制算法,廣泛應用于溫度控制、流量控制轉速控制等。PID算法的核心是P參數(比例調節)、I參數(積分調節)、D參數(微分調節),PID控制器的輸入參量是過程變量和設置點。這里的過程變量就是實際轉速值,設置點就是設定的轉速值。PID控制器根據預先設置好的P、I、D參數,利用PID算法計算出一個控制量,該控制量作用于系統后迫使實際轉速向著設定轉速逼近,最終穩定在設定轉速上。PID算法由公式(2)表達:
![]()
其中e=SP-PV,SP是設定點,PV是過程變量;KC是控制增益,代表比例調節作用;Ti是積分時間,代表著積分調節作用;Td是微分時間,代表著微分調節作用。
4.3 時序產生模塊
直流無刷電機正常旋轉時需要在繞組線圈中按照一定時序注入電流,線圈電流方向的改變是通過改變三相輸出端的極性來實現的。因此在不同的霍爾信號下,需要輸入相對應的控制信號(見表1)。A、B、C分別為電機的霍爾信號。AH、AL、BH、BL、CH、CL分別為三相控制信號。電機的轉速是通過PWM波的脈沖寬度的大小來控制的。具體實現方法是,在CompactRIO中將脈寬調制波與電機的下橋驅動信號在邏輯上“相與”。圖4是根據電機時序確定的控制信號圖,圖5是經PWM波調制后的控制信號圖。


霍爾傳感器相關文章:霍爾傳感器工作原理
液位計相關文章:磁翻板液位計原理
霍爾傳感器相關文章:霍爾傳感器原理









評論