基于MSP430F449的懸掛運動控制系統設計

由圖可看出,只用控制兩根線即可實現對驅動器的控制:
CP:步進脈沖輸入端,上升沿有效;
U/D:方向控制器,U/D=1時電機正轉,U/D=0或懸空時電機反轉。
兩相步進電機C6696-9012K驅動器控制方法與三相十分類似,不再贅述。
4.2 紅外對管電路設計
我們選用紅外對管ST188。ST188由高發射功率紅外光電二極管和高靈敏度光電晶體管組成。檢測距離可調整范圍大,4~13mm可用。其響應時間受檢測表面光潔度及平整度的影響,所以實驗時要保持白板平面的潔凈與黑色軌道的平整。本文引用地址:http://www.104case.com/article/161134.htm
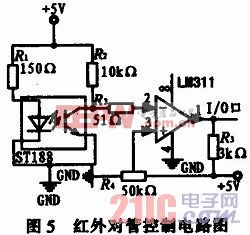
紅外傳感器電路如圖5所示。當傳感器處于黑線上方時,由于黑線紅外光線的反射能力很弱,光敏三極管截止,輸出端為高電平;反之,傳感器離開黑線時,輸出端為低電平。將此電平送至比較器LM311,與標準電平比較,若高于標準電平,則比較器輸出高電平,反之,輸出低電平。實驗中,調節R4測量出最合適的標準電平為2.4 V。處理器通過判斷比較器輸出電平的高低來辨別受控物體的位置,從而通過控制步進電機來控制物體運動。
4.3 按鍵模塊設計
系統軟件設置了兩種模式:INPUT和CONTROL模式。
1)CONTROL模式下,按健操作直接對電機進行命令,主要完成手動或自動控制左右電機正反旋轉,畫固定的直線、圓,循跡等功能。
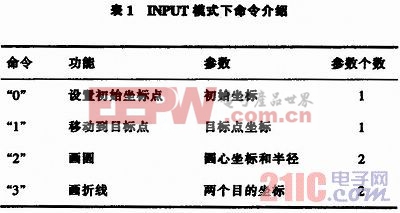
2)INPUT模式下,本系統軟件中采取了輸入命令+參數的模式,設置了3個命令,其功能列表如下:
5 系統軟件設計
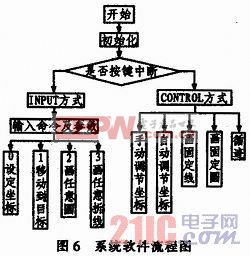
本系統軟件主要用基于430單片機的C語言,主要完成用戶輸入輸出處理和系統控制,故軟件設置了INPUT和CONTROL兩種模式。最主要的部分是:畫直線控制、畫圓控制、循跡等幾個控制算法。其中按健的處理很重要,有限的按鍵要用于多方面控制,包括電機的一步或多步控制、電機控制或按鍵輸入,一鍵多用導致整個程序的復雜。不過,該軟件模仿DOS系統輸入命令進行操作的方式選擇所有功能,搭建了一個大框架,思路清晰,移植性強,人機交互良好。系統初始化后,等待按鍵輸入,選擇控制或輸入功能后進行相應操作。系統軟件總流程圖如圖6所示。
6 結束語
本懸掛運動控制系統很好的完成了設計要求中的各項基本指標和發揮要求,并有不同程度的提高。通過按鍵即可完成整個測試過程,如畫任意直線、任意圓點和半徑的圓,紅外傳感數據采集、處理和結果顯示、記錄均由測試系統自動完成。但如果電機轉軸半徑及懸線半徑都變小,白板表面變平滑,系統性能會更大幅度提高。













評論