基于步進電機細分驅動的太陽能自動跟蹤系統的設計

式6為兩相混合式步進電機細分的數學模型

式中:ia是A相電流,ib是B相電流,in是額定電流,n是細分數,s是步數為了實現恒力矩驅動,并保持力矩輸出為最大值,相電流的變化取三角函數關系。本文引用地址:http://www.104case.com/article/161096.htm
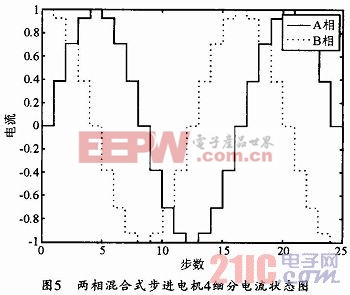
兩相混合式步進電機4細分電流狀態圖如圖5所示。可以看出,初始時A相電流ia=0,B相通額定電流in;第一步時,A相電流ia=insin(22.5°)=0.38in,B相電流ib=incos(22.5°)=0.92in;第二步時,ia=0.71in,ib=0.71in,……
2.2 步進電機細分驅動的實現
文中設計的太陽能自動跟蹤系統的步進電機細分驅動采用THB6064H來實現,采用兩相混合式步進電機,其整步步距角是1.8°/步,半步是0.9°/步。THB6064H是一個PWM斬波式正弦波微步步進電機驅動器。它內部集成了細分、衰減模式設置、電路調節、CMOS功率放大等電路。其主要參數和性能指標如下:
(1)單芯片兩相正弦細分步進電機驅動。
(2)采用高耐壓BiCD工藝。
(3)可實現正反轉控制。
(4)可選擇細分控制(1/2,1/8,1/10,1/16,1/20,1/32,1/40,1/64)。
(5)高輸出耐壓。
(6)高輸出電流。
(7)有輸出監視管腳。
(8)芯片內部有過熱保護和過流檢測電路。
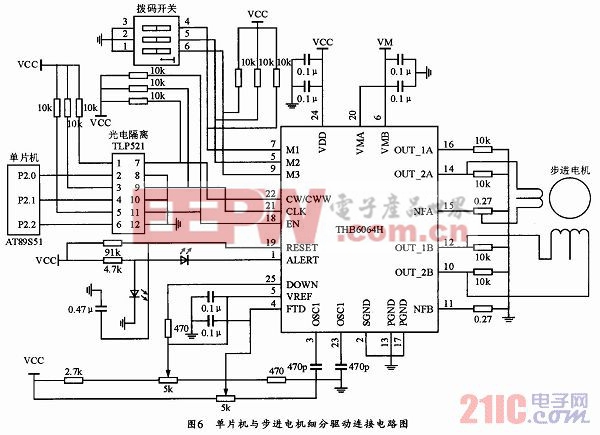
單片機與步進電機細分驅動連接電路如圖6。單片機P0.2端發出高電平信號經過光電隔離芯片TLP521,使能端EN變為高電平,芯片開始工作;CW/CWW端為步進電機正反轉控制端,用高低電平控制;CLK端為脈沖輸入端。撥碼開關確定細分數后,步進電機細分后的步距角也隨之確定,需要步進電機轉多大角度,只需轉換為脈沖數后通過P0.1向CLK端發送脈沖即可,為了避免步進電機過沖,而且在太陽能自動跟蹤系統中使用,也不必過快旋轉,所以脈沖頻率不能太高。用THB6064H芯片設計的步進電機細分驅動電路的外圍電路簡單,可靠性高,并且與單片機的連線只有三根。









評論