位差超聲波傳感器在智能玩具機器人中的應用

2 軟件設計
2.1 測距子程序設計
根據位差超聲波傳感器的時序原理圖,對C51單片機內部定時/計數器編程,實現對前方物體距離的測量并將測量結果在LCD模塊上顯示。測距子程序的基本設計算法,用流程圖表示如圖4所示。本文引用地址:http://www.104case.com/article/161086.htm
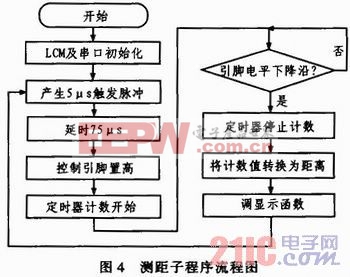
程序設計思路主要分為2步:
1)根據位差超聲波傳感器的控制時序圖(圖3),啟動位差超聲波距離傳感器,即通過單片機編程,給超聲波傳感器的信號引腳提供一個持續時間為5μs的高電平,然后拉低信號引腳750μs,這樣位差超聲波傳感器就被啟動,發出超聲爆裂,與此同時,啟動單片機的定時器開始計數,當超聲波遇到物體時會立即反射回來,位差超聲波傳感器的接收器接到回波時,會自動拉低其信號引腳的電平,單片機查詢到此引腳的電平下降沿到來時停止定時器計數,此時定時器計數值就間接反應了超聲波從反射到返回所經歷的時間。
2)讀出定時器的計數值除以2,便得到超聲波在遇到被測物體返回的時間,根據:距離=速度×時間,就可以計算出前方物體的距離,因超聲波在常溫下的空氣介質中傳播的速度大約為344 m/s,即29.034μs超聲波能傳播1 cm,具體編程時在程序中用語句x=count/29.034來計算距離值,獲得被測距離值后,調用LCD顯示函數將距離值在LCD模塊上顯示出來。
2.2 超聲波導航程序設計
利用位差超聲波距離傳感器測得的“距離”信息,可以引導智能玩具機器人實現避障行走。當智能玩具機器人距離前面障礙物小于20 cm時,它會向左拐改變行進方向,避免與物體碰撞,下面簡要分析以超聲波導航程序的基本設計思路,程序設計算法用流程圖表示如圖5所示。
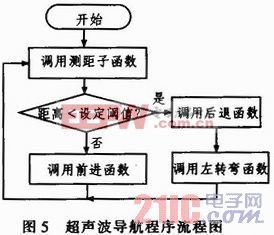
程序通過反復調用超聲波測距子程序,獲取智能玩具機器人前方被測物體的距離值;判斷距離是否在設定閾值以內,若大于程序設定的距離閾值,調用函數Forward(),驅動智能玩具機器人前進;若小于程序設定的距離閾值,調用Backward(),驅動智能玩具機器人后退一段距離;接著又調用Left_Turn(),驅動智能玩具機器人左拐后程序再返回重復以上過程。
3 系統調試
3.1 硬件系統的調試
硬件系統的制作與調試相對簡單,其具體過程簡述如下:首先根據硬件設計原理圖,采用Protel DXP2004軟件合理布局和布線,設計出智能玩具機器人的控制器PCB,然后用制板設備制作出PCB樣板;根據元器件清單,在PCB上安裝焊接好元器件,連接好直流伺服電機,將測試軟件下載到智能玩具控制器的單片機存儲器,接通電源開機運行,用示波器測試觀察控制器的單片機最小系統運行時關鍵點信號波形是否正常。
3.2 系統整體調試
根據上述程序設計思路,在Keil C編譯環境中用C語言編寫程序代碼,編譯程序,將生成的HEX文件燒寫到控制板上的單片機程序存儲器,開機運行,智能玩具機器人按程序設定運行模式前進,當前方有物體時,在LCD顯示屏上實時準確地顯示出小車和前方物體之間的距離值;當小車距前方物體小于程序設定的距離閾值時,小車掉轉方向繼續前進,經反復實驗表明:位差超聲波距離傳感器在下列情況下不能精確地測量距離,如圖6所示。

1)與物體距離大于3 m當被測物體距離智能玩具機器人3 m之外時,如圖6(a)所示,因位差超聲波傳感器的發射功率不夠,反射回來的信號太弱,導致LCD上顯示出的距離值不能反映實際距離值。
2)被測物體不在正前方 當被測物體不在智能玩具機器人正前方,如圖6(b)所示,而是有一定的偏角,因與物體的表面形成的反射角度太小,使傳感器接收器接收不到反射回來的信號,導致LCD上顯示出的距離值不能反映實際距離值。
3)前方被測物體橫截面太小 當前方被測物體體積太小或是橫截面太小,如圖6(c)所示,因為沒有足夠強度的信號返回到傳感器,導致LCD上顯示出的距離值不能反映實際距離值。
4 結束語
超聲波傳感器在非接觸性測量方面的應用非常廣泛,可用于檢測液體水位(特別是具有腐蝕性的液體,如硫酸、硝酸液體),汽車倒車防撞系統,金屬(或非金屬)探傷,機器人感知系統設計等,利用位差超聲波傳感器與51單片機構成智能玩具機器人的“距離感知系統”,具有電路接口簡單,成本低廉,穩定性好等特點,但其測量精度受到位差超聲波傳感器的最大測量距離以及與被測物體反射角等的限制。

伺服電機相關文章:伺服電機工作原理











評論