基于Qt的AUV監(jiān)控系統(tǒng)設(shè)計(jì)與開發(fā)

3 AUV監(jiān)控軟件設(shè)計(jì)
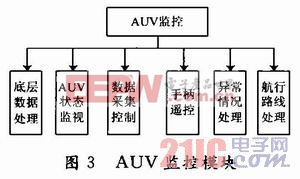
AUV的監(jiān)控以人機(jī)交互的形式實(shí)現(xiàn)(如圖2所示),主要是對(duì)AUV各個(gè)模塊工作狀態(tài)的監(jiān)視以及工作模式的設(shè)置,由圖3可知,控制模塊功能的劃分可知AUV監(jiān)控模塊的主要功能包括底層數(shù)據(jù)處理、AUV狀態(tài)監(jiān)視、數(shù)據(jù)采集控制、手柄遙控、異常處理以及航行路線的設(shè)定。運(yùn)用模塊化技術(shù),可以將錯(cuò)誤局限在各個(gè)模塊內(nèi)部,避免錯(cuò)誤蔓延,提高AUV系統(tǒng)的可靠性。還可以利用以前已經(jīng)被證明是可靠的模塊來構(gòu)造新的系統(tǒng),這就不但減少了新系統(tǒng)開發(fā)的工作量,也提高了系統(tǒng)的可靠性。本文引用地址:http://www.104case.com/article/160841.htm

該監(jiān)控模塊(如圖3所示)采用多線程技術(shù)和網(wǎng)絡(luò)通信實(shí)現(xiàn)以及基于Qt的信號(hào)與槽機(jī)制。多線程技術(shù)主要是創(chuàng)建繼承Qthread的多個(gè)類,實(shí)現(xiàn)對(duì)數(shù)據(jù)的接收與處理,手柄控制等多個(gè)線程。網(wǎng)絡(luò)通信則是通過繼承QtcpServet的服務(wù)器端與底層來實(shí)現(xiàn)實(shí)時(shí)通信,通過網(wǎng)絡(luò)通信實(shí)現(xiàn)對(duì)AUV的實(shí)時(shí)監(jiān)測(cè)。而基于Qt的信號(hào)與槽機(jī)制則用于通過岸基平臺(tái)的人機(jī)交互界面對(duì)AUV實(shí)時(shí)狀態(tài)進(jìn)行監(jiān)測(cè)和控制。三者結(jié)合,實(shí)現(xiàn)對(duì)AUV各個(gè)方面的監(jiān)測(cè)和控制,以便AUV能高效準(zhǔn)確的工作。
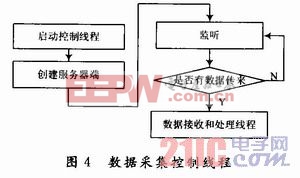
數(shù)據(jù)采集控制線程(如圖4所示),其余的監(jiān)控線程都采用類似的形式。
4 結(jié)語
本文簡(jiǎn)單介紹了Qt下的監(jiān)控系統(tǒng)的開發(fā)和設(shè)計(jì),程序設(shè)計(jì)上還有很多不足,有待進(jìn)一步改善提高。基于Qt平臺(tái)強(qiáng)大的可移植性及其庫函數(shù),使程序開發(fā)設(shè)計(jì)起來更具效率。

測(cè)速儀相關(guān)文章:測(cè)速儀原理






評(píng)論